
Prof. Dr. Christian Hansen
Short Bio
I am a Full Professor (W3) of Virtual and Augmented Reality at the Faculty of Computer Science and the Research Campus STIMULATE at Otto von Guericke University Magdeburg, Germany.
I studied Computational Visualistics at Otto von Guericke University Magdeburg, completing my bachelor’s research at the Aristotle University of Thessaloniki in 2004 and my master’s thesis at the Center for Medical Diagnostic Systems and Visualization at the University of Bremen in 2006. After graduating, I joined the Fraunhofer Institute for Digital Medicine MEVIS in Bremen as a research scientist (2006–2013) and received my PhD in Computer Science from Jacobs University Bremen in 2012.
In 2013, I was appointed Junior Professor of Computer-Assisted Surgery at Otto von Guericke University Magdeburg. I held a DFG-funded research fellowship at Harvard Medical School from 2017 to 2018. From 2020 to 2024, I served as Extraordinary Professor of Virtual and Augmented Reality before being promoted to Full Professor in 2024.
Research Interests
My research focuses on virtual and augmented reality, human–machine interaction, and medical visualization. In particular, I investigate immersive, interaction-driven systems for interventional radiology, liver surgery, and urology. My work aims to integrate advanced image analysis, efficient user interfaces, and workflow-aware solutions into clinical environments.
Find me also here: ![]() Google Scholar |
Google Scholar | ![]() ORCID |
ORCID | ![]() ResearchGate |
ResearchGate | ![]() LinkedIn |
LinkedIn |
Publications
2026

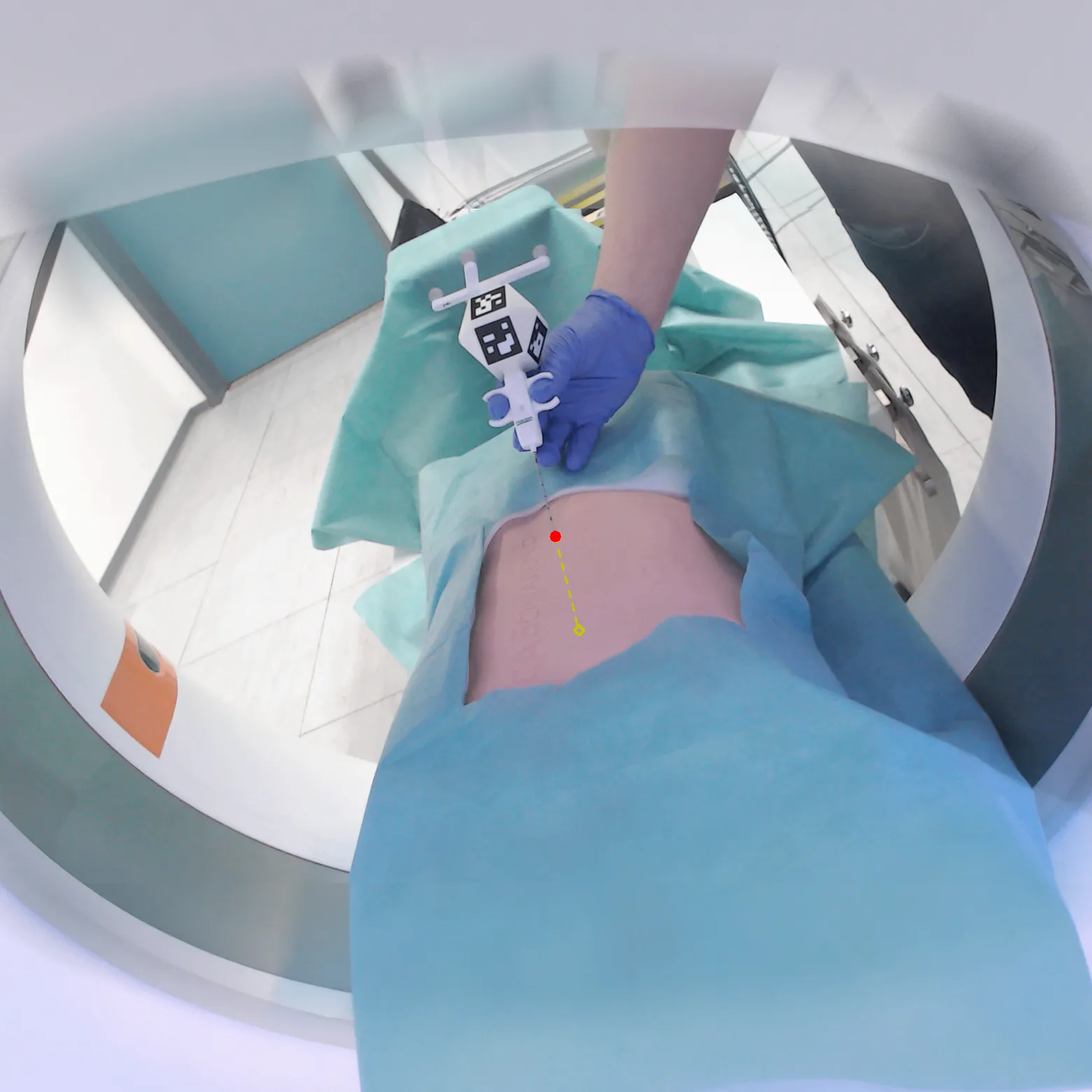
Heinrich, F; Kohpeiß, M; Hansen, C; Schott, D
Mixed Reality Simulation of Guided Needle Insertion: Effects of Interaction and Visual Fidelity Journal Article
In: International Journal of Computer Assisted Radiology and Surgery, 2026.
@article{nokey,
title = {Mixed Reality Simulation of Guided Needle Insertion: Effects of Interaction and Visual Fidelity},
author = {F Heinrich and M Kohpeiß and C Hansen and D Schott},
year = {2026},
date = {2026-07-08},
urldate = {2026-07-08},
journal = {International Journal of Computer Assisted Radiology and Surgery},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Schrader, C; Diekmann, C; Kunz, M; Albrecht, A; Hansen, C; Schott, D
In: Computers & Education: X Reality, vol. 9, pp. 100172, 2026.
@article{nokey,
title = {Applying the Signaling Principle in Immersive Virtual Reality for Medical Education: Effects of Color Coding on Virtual Presence, Learning-Centered Emotions, Cognitive Load, and Learning Outcomes },
author = {C Schrader and C Diekmann and M Kunz and A Albrecht and C Hansen and D Schott},
url = {https://www.sciencedirect.com/science/article/pii/S2949678026000401},
year = {2026},
date = {2026-07-01},
urldate = {2026-07-01},
journal = {Computers & Education: X Reality},
volume = {9},
pages = {100172},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Schreiter, J; Pandi, P; Klank, R; Hansen, C; Heinrich, F
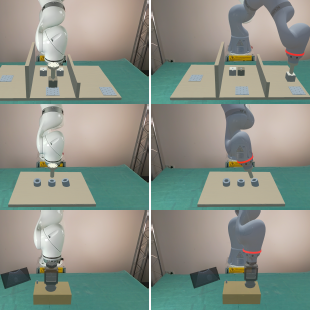
Touch-Based Interaction and Clutching Strategies in Collaborative Robotics across Task Types Proceedings Article
In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026, (accepted ).
@inproceedings{nokey,
title = {Touch-Based Interaction and Clutching Strategies in Collaborative Robotics across Task Types},
author = {J Schreiter and P Pandi and R Klank and C Hansen and F Heinrich},
year = {2026},
date = {2026-06-30},
urldate = {2026-06-30},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
note = {accepted },
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
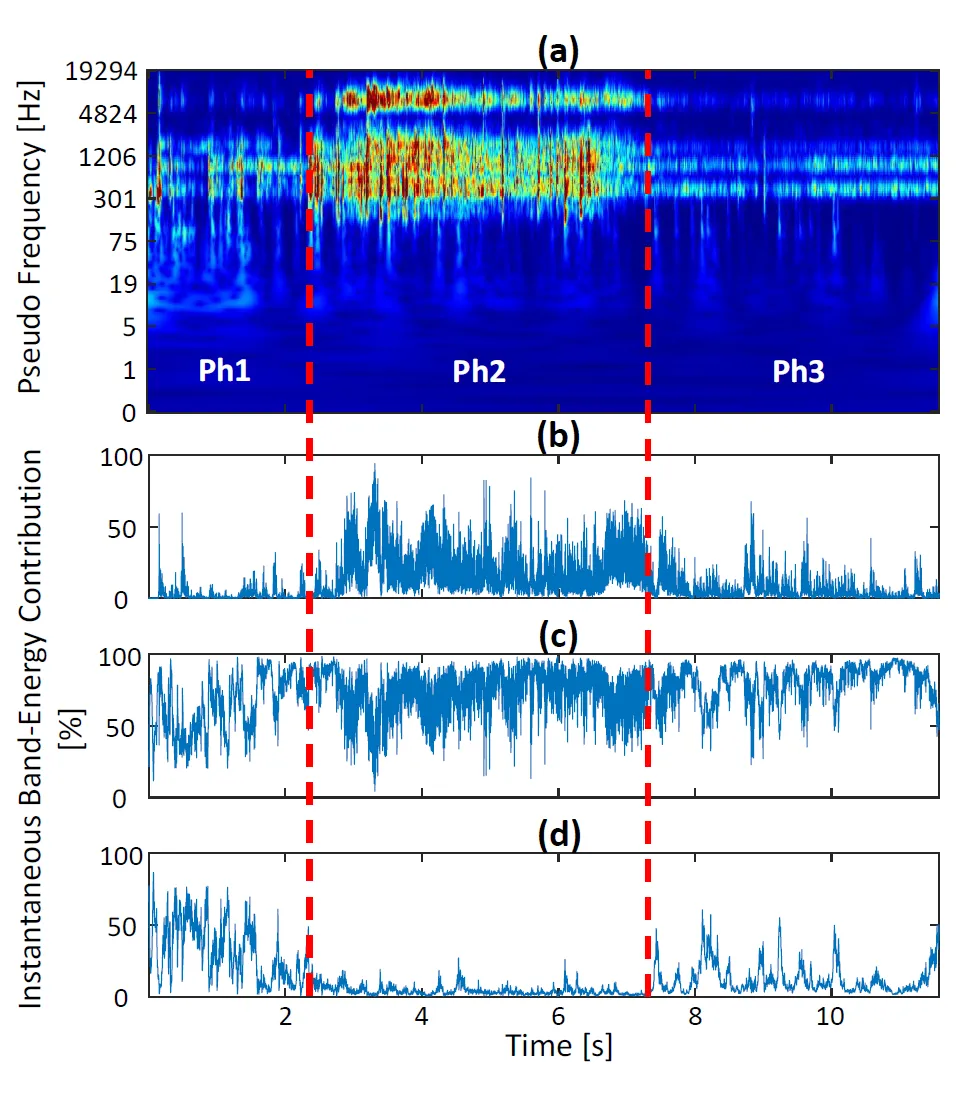
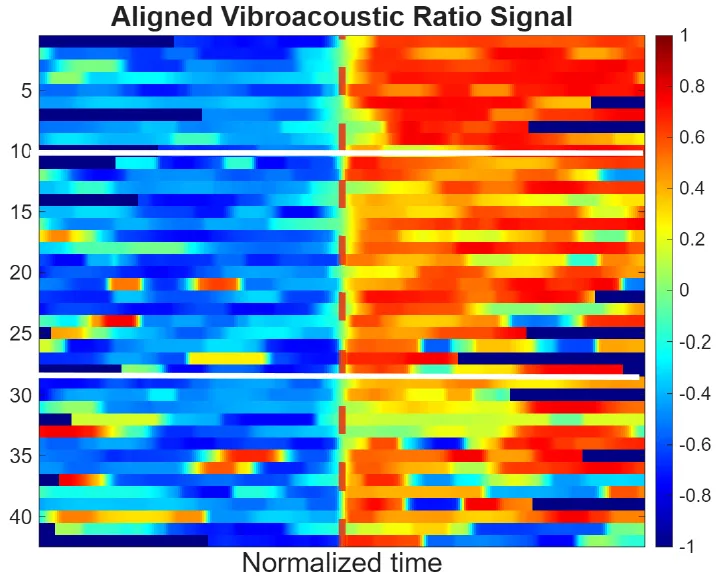
Esmaeili, N; Urrutia, R; Espejo, D; Boese, A; Horvath, P; Hansen, C; Hagenah, J; Illanes, A
When Tissue Speaks: Vibroacoustic Monitoring of Tissue Response during Electrosurgery Proceedings Article
In: Medical Image Computing and Computer Assisted Intervention (MICCAI), 2026, (provisionally accepted).
@inproceedings{nokey,
title = {When Tissue Speaks: Vibroacoustic Monitoring of Tissue Response during Electrosurgery},
author = {N Esmaeili and R Urrutia and D Espejo and A Boese and P Horvath and C Hansen and J Hagenah and A Illanes},
year = {2026},
date = {2026-06-19},
urldate = {2026-09-21},
publisher = {Medical Image Computing and Computer Assisted Intervention (MICCAI)},
note = {provisionally accepted},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Urrutia, R; Esmaeili, N; Matinfar, S; Boese, A; Davaris, N; Arens, C; Hansen, C; Illanes, A
Where Is the Needle Tip? Vibroacoustic Sensing Reveals Hidden Needle-Tissue Transitions During Ultrasound Guidance Proceedings Article
In: Medical Image Computing and Computer Assisted Intervention (MICCAI), 2026, (provisionally accepted).
@inproceedings{nokey,
title = {Where Is the Needle Tip? Vibroacoustic Sensing Reveals Hidden Needle-Tissue Transitions During Ultrasound Guidance},
author = {R Urrutia and N Esmaeili and S Matinfar and A Boese and N Davaris and C Arens and C Hansen and A Illanes},
year = {2026},
date = {2026-06-18},
urldate = {2026-06-18},
issuetitle = {Medical Image Computing and Computer Assisted Intervention (MICCAI)},
publisher = {Medical Image Computing and Computer Assisted Intervention (MICCAI)},
note = {provisionally accepted},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Illanes, A; Esmaeili, N; Urrutia, R; Espejo, D; Hagenah, J; Hansen, C; Boese, A
Ex Vivo Tissue Differentiation Using Vibroacoustic Sensing at the Proximal End of Laparoscopic Instruments Proceedings Article
In: IEEE Engineering in Medicine and Biology Society (EMBC), 2026, (accepted).
@inproceedings{nokey,
title = {Ex Vivo Tissue Differentiation Using Vibroacoustic Sensing at the Proximal End of Laparoscopic Instruments},
author = {A Illanes and N Esmaeili and R Urrutia and D Espejo and J Hagenah and C Hansen and A Boese},
year = {2026},
date = {2026-06-17},
urldate = {2026-06-17},
booktitle = { IEEE Engineering in Medicine and Biology Society (EMBC)},
note = {accepted},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Steiger, M; Rezapourian, M; Rak, M; Hansen, C
Dynamic Uncertainty-level Assessment Framework for Real-time Needle tracking in CT-guided Surgical Environments Journal Article
In: International Journal of Computer Assisted Radiology and Surgery, 2026, (in print).
@article{nokey,
title = {Dynamic Uncertainty-level Assessment Framework for Real-time Needle tracking in CT-guided Surgical Environments},
author = {M Steiger and M Rezapourian and M Rak and C Hansen},
url = {https://link.springer.com/article/10.1007/s11548-026-03725-w},
doi = {https://doi.org/10.1007/s11548-026-03725-w},
year = {2026},
date = {2026-06-05},
urldate = {2026-06-05},
journal = {International Journal of Computer Assisted Radiology and Surgery},
abstract = {Abstract Purpose: Accurate needle tracking is critical for the success of computed tomography (CT)-guided interventions, where even minor deviations may compromise procedural safety and clinical outcomes. However, existing image-guided tracking systems typically lack mechanisms to quantify and communicate the reliability of their predictions in real time, leaving clinicians to act on guidance of uncertain trustworthiness.
Methods: We propose a Dynamic Uncertainty Level Assessment Framework that provides a quantitative, real-time estimate of tracking reliability by linearly linking a predicted uncertainty score to spatial tracking error. The framework consists of three different approaches: (1) a classic method based on dynamically weighted, interpretable reliability metrics; (2) a lightweight convolutional neural network (CNN) that predicts uncertainty directly from multi-view image data; and (3) a hybrid CNN that adaptively optimizes metric weights while preserving interpretability. The uncertainty level is defined on a fixed scale, with 0% corresponding to ideal tracking (error of 0 mm) and 100% to a tracking error of 10 mm.
Results: Experimental validation on clinical and clinically realistic laboratory datasets of ∼30,000 frames demonstrates a strong positive correlation between uncertainty and error (Pearson r > 0.82) and achieves a stable tracking error estimation (error difference < 0.6 mm) with real-time performance (5 ms per frame). Conclusion: By enabling an intuitive uncertainty-to-error mapping, the proposed framework supports more informed intraprocedural decision-making, enhances operator trust in guidance data, and establishes a practical basis for integration into uncertainty-aware CT-guided intervention systems.},
note = {in print},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Methods: We propose a Dynamic Uncertainty Level Assessment Framework that provides a quantitative, real-time estimate of tracking reliability by linearly linking a predicted uncertainty score to spatial tracking error. The framework consists of three different approaches: (1) a classic method based on dynamically weighted, interpretable reliability metrics; (2) a lightweight convolutional neural network (CNN) that predicts uncertainty directly from multi-view image data; and (3) a hybrid CNN that adaptively optimizes metric weights while preserving interpretability. The uncertainty level is defined on a fixed scale, with 0% corresponding to ideal tracking (error of 0 mm) and 100% to a tracking error of 10 mm.
Results: Experimental validation on clinical and clinically realistic laboratory datasets of ∼30,000 frames demonstrates a strong positive correlation between uncertainty and error (Pearson r > 0.82) and achieves a stable tracking error estimation (error difference < 0.6 mm) with real-time performance (5 ms per frame). Conclusion: By enabling an intuitive uncertainty-to-error mapping, the proposed framework supports more informed intraprocedural decision-making, enhances operator trust in guidance data, and establishes a practical basis for integration into uncertainty-aware CT-guided intervention systems.
Steiger, M; Mielke, T; Bashkanov, O; Großer, O S; Pech, M; Hansen, C; Rak, M
Real-time Marker-less Needle Tracking for CT-guided Interventions using Multiple RGB Cameras Journal Article
In: International Journal of Computer Assisted Radiology and Surgery, 2026, (in print).
@article{nokey,
title = {Real-time Marker-less Needle Tracking for CT-guided Interventions using Multiple RGB Cameras},
author = {M Steiger and T Mielke and O Bashkanov and O S Großer and M Pech and C Hansen and M Rak },
url = {https://link.springer.com/article/10.1007/s11548-026-03622-2},
doi = {10.1007/s11548-026-03622-2},
year = {2026},
date = {2026-05-10},
urldate = {2026-05-10},
journal = {International Journal of Computer Assisted Radiology and Surgery},
abstract = {Purpose: In CT-guided interventions, instrument tracking reduces patient risk while improving the overall outcome. Though useful, marker-based tracking systems suffer from occlusion, are complex to set up, and fail when needles deflect. A markerless tracking system could overcome these challenges, enabling streamlined integration.
Methods: We developed and evaluated a proof-of-concept system combining standard RGB cameras with a U-Net-ConvNeXt architecture for needle detection and tracking. We compiled a fully annotated dataset of 35,000 frames, spanning multiple needle types and scenarios. We evaluated tracking accuracy against state-of-the-art marker-based systems, utilizing an IR-based and an image-based system on static positioning, dynamic movement, and needle-deflection scenarios. Moreover, our marker-less system was evaluated using both known and unknown needle types.
Results: Our proof-of-concept system demonstrated a 3D tracking error of 2.70 ± 1.07mm at 25FPS with 3 cameras, outperforming ArUco marker-based tracking (5.29 ± 1.85mm). Tracking accuracy remained consistent for unknown needle types not included in the training data, suggesting strong generalization. The system maintained a 99.4% needle-tip detection rate across all frames with robust performance during needle deflection, while marker-based systems failed under identical conditions. With only 2 cameras, the tracking error of our system increased modestly (4.81 ± 2.38mm).
Conclusion: Our proof-of-concept demonstrates the feasibility of marker-less needle tracking, suggesting potential for clinically relevant accuracy, reliability, and reduced complexity while exhibiting robustness to needle deflection and varying needle appearances. These preliminary results indicate promising directions for future clinical development.},
note = {in print},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Methods: We developed and evaluated a proof-of-concept system combining standard RGB cameras with a U-Net-ConvNeXt architecture for needle detection and tracking. We compiled a fully annotated dataset of 35,000 frames, spanning multiple needle types and scenarios. We evaluated tracking accuracy against state-of-the-art marker-based systems, utilizing an IR-based and an image-based system on static positioning, dynamic movement, and needle-deflection scenarios. Moreover, our marker-less system was evaluated using both known and unknown needle types.
Results: Our proof-of-concept system demonstrated a 3D tracking error of 2.70 ± 1.07mm at 25FPS with 3 cameras, outperforming ArUco marker-based tracking (5.29 ± 1.85mm). Tracking accuracy remained consistent for unknown needle types not included in the training data, suggesting strong generalization. The system maintained a 99.4% needle-tip detection rate across all frames with robust performance during needle deflection, while marker-based systems failed under identical conditions. With only 2 cameras, the tracking error of our system increased modestly (4.81 ± 2.38mm).
Conclusion: Our proof-of-concept demonstrates the feasibility of marker-less needle tracking, suggesting potential for clinically relevant accuracy, reliability, and reduced complexity while exhibiting robustness to needle deflection and varying needle appearances. These preliminary results indicate promising directions for future clinical development.
Schott, D; Kunz, M; Schrader, C; Ringler, E; Schwadtke, A; Mandel, J; Müller, P; Kleinbeck, C; Roth, D; Albrecht, A; Hansen, C
The Influence of Environmental Fidelity on Virtual Presence, Intrinsic Motivation, Cognitive Load and Learning Outcomes in Medical VR Journal Article
In: IEEE Transactions on Visualization and Computer Graphics, vol. 32, no. 5, pp. 4302-4311, 2026.
@article{nokeyb,
title = {The Influence of Environmental Fidelity on Virtual Presence, Intrinsic Motivation, Cognitive Load and Learning Outcomes in Medical VR},
author = {D Schott and M Kunz and C Schrader and E Ringler and A Schwadtke and J Mandel and P Müller and C Kleinbeck and D Roth and A Albrecht and C Hansen},
url = {https://ieeexplore.ieee.org/document/11475220/},
doi = {10.1109/TVCG.2026.3680702},
year = {2026},
date = {2026-05-01},
urldate = {2026-05-01},
journal = {IEEE Transactions on Visualization and Computer Graphics},
volume = {32},
number = {5},
pages = {4302-4311},
howpublished = {IEEE Conference on Virtual Reality and 3D User Interfaces (VR)},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Heinrich, F; Schülke, Lisa; Kohpeiss, Marvin; Schott, D; Hansen, C
Towards Simulating Projector-Based Augmented Reality in Virtual Reality for Interventional Evaluation Journal Article
In: pp. 758-763, 2026.
@article{nokey,
title = {Towards Simulating Projector-Based Augmented Reality in Virtual Reality for Interventional Evaluation},
author = {F Heinrich and Lisa Schülke and Marvin Kohpeiss and D Schott and C Hansen},
doi = {doi:10.1109/VRW70859.2026.00145},
year = {2026},
date = {2026-05-01},
urldate = {2026-05-01},
booktitle = {IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW)},
pages = {758-763},
publisher = {IEEE},
abstract = {Evaluating projector-based augmented reality (AR) systems for interventional guidance in clinical environments is costly, timeconsuming, and subject to strict safety constraints. We present a virtual reality (VR)–based simulation approach that enables earlystage evaluation of projector-based AR guidance concepts without requiring physical hardware. A virtual interventional room was created based on a real CT suite and combined with hand-tracked needle interaction and a simulated projector-based guidance visualization. We evaluated the system in a virtual needle insertion task using performance metrics as well as established presence and user experience questionnaires. Results indicate high perceived presence and user experience, while revealing limitations in absolute insertion accuracy. Our initial findings suggest that VR-based simulation is a promising tool for early interventional evaluation of projector-based AR concepts, particularly for usability and user experience studies.},
howpublished = { IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Weiss, S; Hanke, L; Schröder, E; Weinberg, M; Dicks, T; Castell, C; Wessels, M; Hecht, H; Dietz, P; Huber, T; Hansen, C
Bridging the Reality Gap: Immersive VR Simulation for Enhancing Stress Resilience in Medical Students Proceedings Article
In: IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), pp. 814-818, 2026.
@inproceedings{nokey,
title = {Bridging the Reality Gap: Immersive VR Simulation for Enhancing Stress Resilience in Medical Students},
author = {S Weiss and L Hanke and E Schröder and M Weinberg and T Dicks and C Castell and M Wessels and H Hecht and P Dietz and T Huber and C Hansen},
doi = {10.1109/VRW70859.2026.00156},
year = {2026},
date = {2026-05-01},
urldate = {2026-05-01},
booktitle = {IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW)},
journal = {2026 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW)},
pages = { 814-818},
abstract = {Medical students often face a “reality gap” between theory and clinical practice, leading to burnout. We present a system to to induce stress as first step for later stress resilience trainings through immersive simulations of clinical conflicts. Based on a survey of 374 professionals, we developed four scenarios targeting stressors like “conflict with superiors” and “time pressure,” utilizing realistic locations and NPCs. Our framework uses a Meta Quest 3 and a custom Android app for real-time experimenter control. To overcome static training limitations, we explore local Large Language Models (LLMs) for generative NPC behavior. We detail a work-in-progress evaluation protocol using physiological measures (HR, HRV, BF) and questionnaires, providing a scalable framework for medical stress inoculation training.},
howpublished = { IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
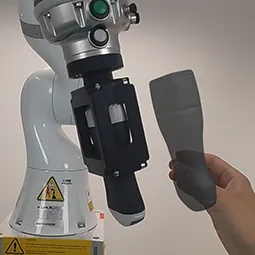
Schreiter, J; Tan, M; Klank, R; Hansen, C; Joeres, F
Exploring Augmented Reality Visualizations for Communicating Robot Intent in Robotic Ultrasound Journal Article
In: pp. 739-744, 2026.
@article{Schreiter2026,
title = {Exploring Augmented Reality Visualizations for Communicating Robot Intent in Robotic Ultrasound},
author = {J Schreiter and M Tan and R Klank and C Hansen and F Joeres},
doi = {10.1109/VRW70859.2026.00142},
year = {2026},
date = {2026-04-30},
urldate = {2026-04-30},
booktitle = {IEEE Conference on Virtual Reality and 3D User Interfaces (VRW)},
pages = {739-744},
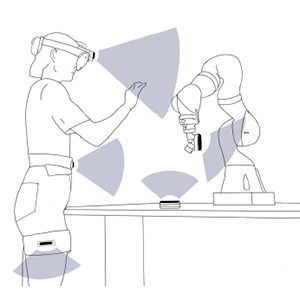
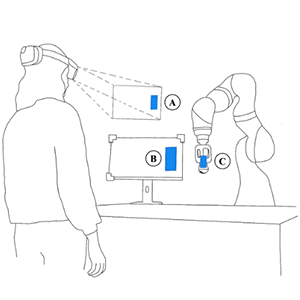
abstract = {Working safely in close proximity to robots, such as during robot-assisted medical procedures, requires communication of robot intent. We investigated how augmented reality (AR) visualizations can convey robot poses, trajectories, and motion progress by comparing several designs in a laboratory study with six participants. Results showed that arrow-based visualizations are preferred for representing robot poses and trajectories. Explicit progress displays were perceived as clearer and safer, but trajectory-based cues were preferred overall due to reduced distraction. Overall, visualizations that conveyed essential information while minimizing occlusion were rated most valuable. This work contributes an initial perspective towards structuring the AR design space for human-robot interaction with a robotic arm, illustrated through the example of robotic ultrasound},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
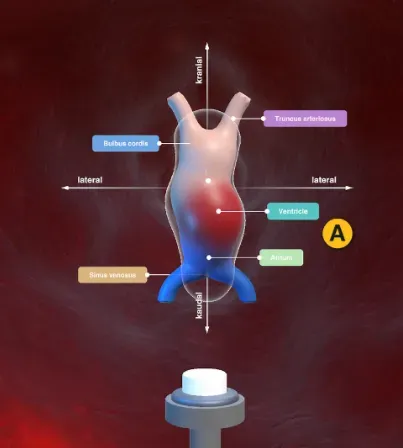
Sabir, A; Ringler, E; Mandel, J; Hansen, C; Schott, D
Evaluation of a State-Aware conversational AI agent for Immersive Anatomy Education Proceedings Article
In: IEEE Conference on Virtual Reality and 3D User Interfaces (VRW), pp. 790-794, 2026.
@inproceedings{Sabir2026,
title = {Evaluation of a State-Aware conversational AI agent for Immersive Anatomy Education},
author = {A Sabir and E Ringler and J Mandel and C Hansen and D Schott},
url = {https://ieeexplore.ieee.org/document/11489889},
doi = {10.1109/VRW70859.2026.00151},
year = {2026},
date = {2026-04-30},
urldate = {2026-04-30},
booktitle = {IEEE Conference on Virtual Reality and 3D User Interfaces (VRW)},
pages = {790-794},
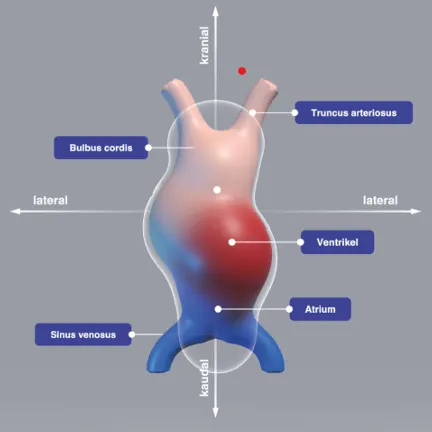
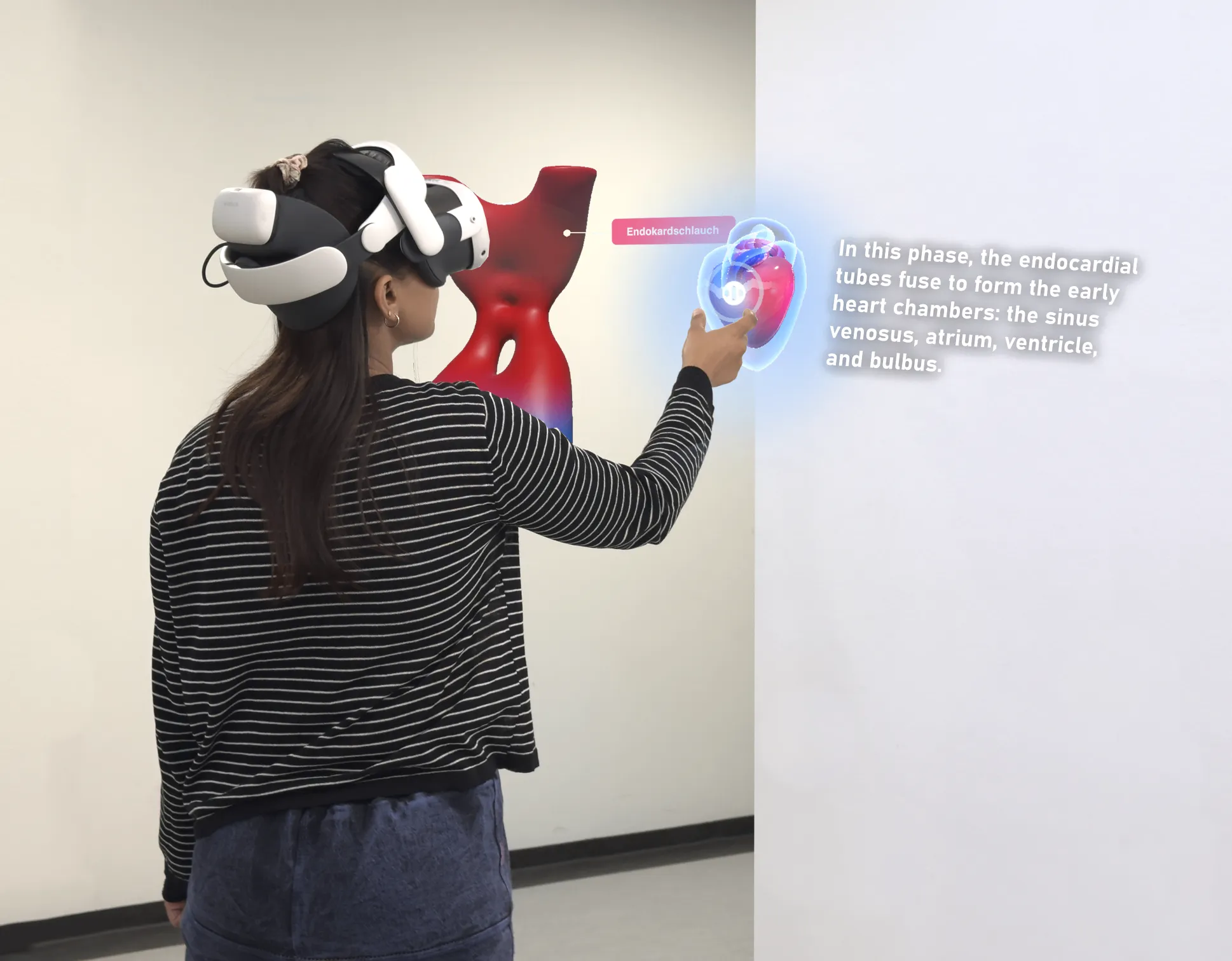
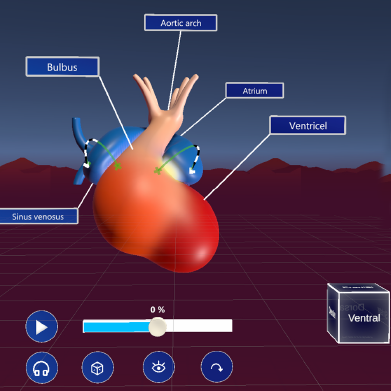
abstract = {The dynamic 3D morphology and temporal complexity of embryonic heart development make it difficult to comprehend. We introduce Reinheart, a conversational AI tutor for anatomy education that is state-aware and integrated into a mixed-reality learning environment. The AI tutor uses OpenAI services to provide voice-based tutoring in real-time with interactive 3D visualization. Using a mixed-method analysis, ten anatomy experts assessed pedagogical performance, usability, and trust. The results indicated high ease-of-use and positive social presence, while qualitative feedback revealed limited uncertainty in communication and instability in challenge tasks. Experts supported the tutor’s potential for conceptual reinforcement and guided exploration. To improve contextual reasoning and instructional reliability in MR anatomy learning, future work should extend this framework with domain-specific, uncertainty-aware AI.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Mielke, T; Georgiades, M; Grosser, O; Pech, M; Hansen, C; Heinrich, F
Enhancing Gesture-Based Human–Robot Interaction: Investigating the Role of Force Automation Proceedings Article
In: ACM/IEEE International Conference on Human-Robot Interaction (HRI), pp. 619-628, 2026.
@inproceedings{nokeyd,
title = {Enhancing Gesture-Based Human–Robot Interaction: Investigating the Role of Force Automation},
author = {T Mielke and M Georgiades and O Grosser and M Pech and C Hansen and F Heinrich},
doi = {10.1145/3757279.3785568},
year = {2026},
date = {2026-03-16},
urldate = {2026-03-16},
booktitle = {ACM/IEEE International Conference on Human-Robot Interaction (HRI)},
pages = {619-628},
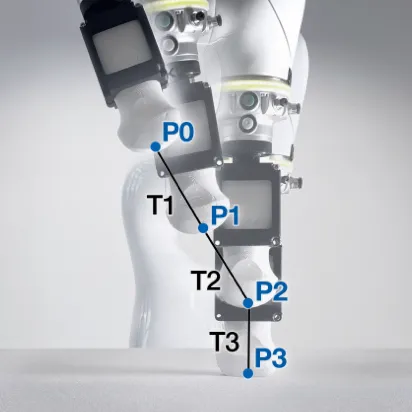
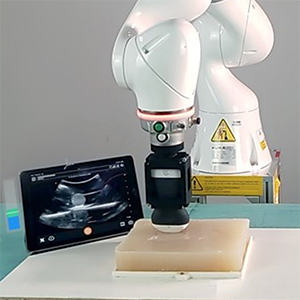
abstract = {Directly controlling robot motion through human–robot interaction enables the integration of human expertise into robot control. However, this requires efficient interaction methods. While previous work has shown that hand gestures offer potential for natural control, the lack of haptic feedback remains a key challenge. One solution is partial automation, in which the contact force is autonomously controlled. We implemented force automation enhanced gesture control, as well as the state-of-the-art baseline of hand-guiding, to systematically investigate hand gesture interaction for robot control. A user study (n=28) was conducted to investigate the efficiency and workload of these interaction concepts. As the interaction method efficiency may depend on task demands, two tasks with different precision requirements were evaluated in the context of robotic ultrasound. The results indicate that force automation significantly reduces perceived workload and task duration when using hand gestures. Moreover, gesture-based interaction can match the efficiency of hand-guiding for broad tasks and even outperform it in precise tasks. These findings highlight the potential of gesture-based interaction for robot control, particularly when the absence of haptic feedback is compensated by partial automation.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
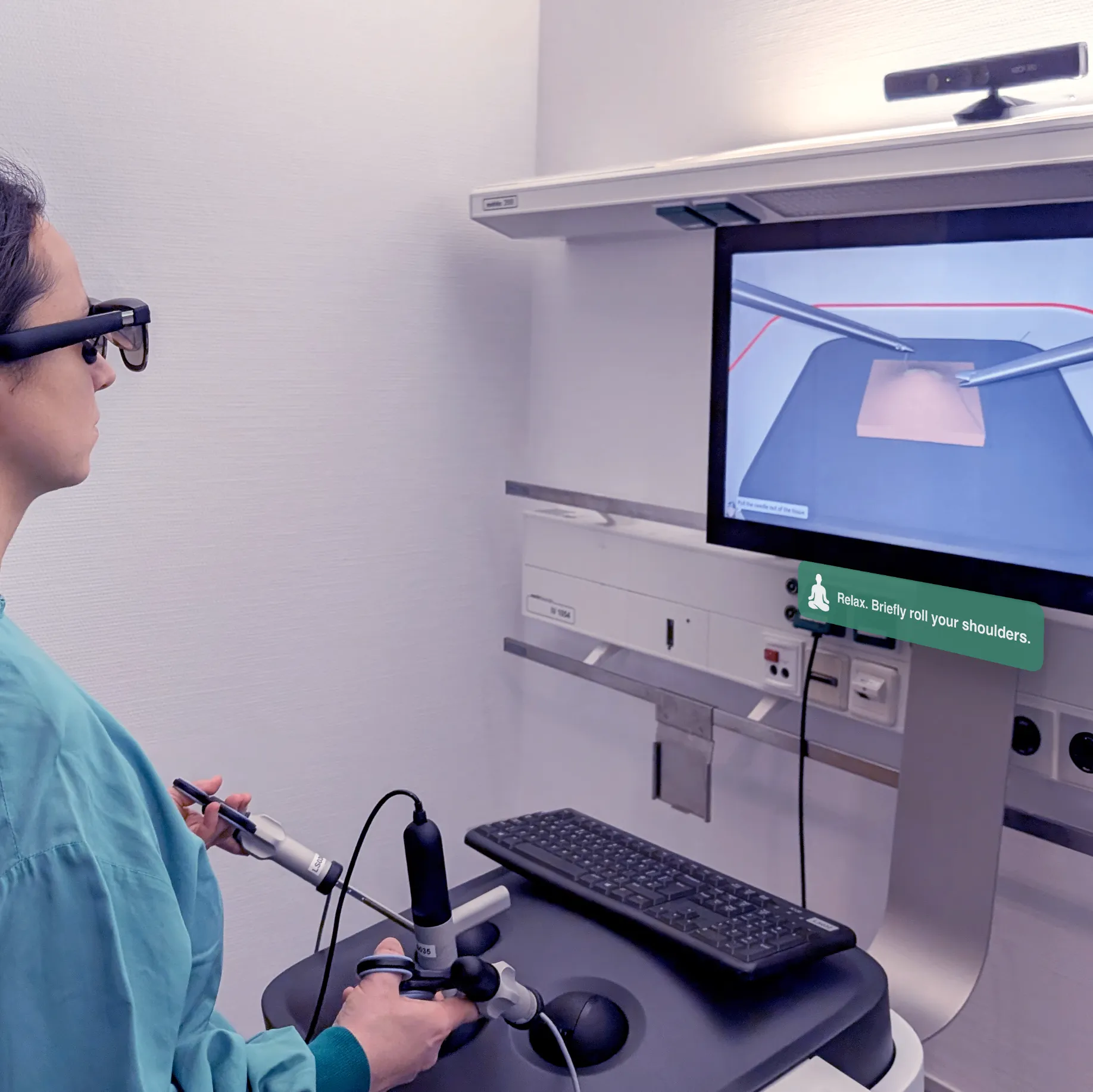
Heinrich, F; Mielke, T; Klank, R; Ortega, F; Hansen, C; Huber, T; Huettl, F
HoloNote: Exploring Augmented Reality Notifications for Ergonomic Feedback in Laparoscopic Training Proceedings Article
In: Extended Abstracts of the CHI Conference on Human Factors in Computing Systems (CHI EA), pp. 1-6, 2026.
@inproceedings{holonote,
title = {HoloNote: Exploring Augmented Reality Notifications for Ergonomic Feedback in Laparoscopic Training},
author = {F Heinrich and T Mielke and R Klank and F Ortega and C Hansen and T Huber and F Huettl},
url = {https://link.springer.com/article/10.1007/s11548-020-02272-2},
year = {2026},
date = {2026-03-01},
urldate = {2026-03-01},
booktitle = {Extended Abstracts of the CHI Conference on Human Factors in Computing Systems (CHI EA)},
number = {368},
pages = {1-6},
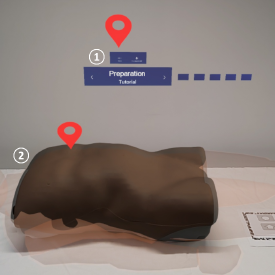
abstract = {Laparoscopic surgery is a physically demanding task that can lead to ergonomic strain. While notification-based approaches have been used to support ergonomics in other domains, their application in laparoscopic surgery remains limited.
Therefore, an augmented reality (AR) notification concept was implemented using lightweight optical see-through AR glasses, examining their suitability for laparoscopic training.
A pilot study with ten surgeons was conducted using a laparoscopic simulator, where participants performed a stitching and knot-tying task with and without AR-based notifications.
All participants were able to complete the tasks while wearing the AR glasses. While task completion times were longer in the AR condition, no conclusive differences in perceived workload were observed. User experience and wearing comfort were rated positively, whereas the notifications were perceived as useful but not consistently effective. The findings suggest that lightweight AR glasses are a feasible platform for ergonomic feedback in laparoscopic training and motivate further investigation.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Therefore, an augmented reality (AR) notification concept was implemented using lightweight optical see-through AR glasses, examining their suitability for laparoscopic training.
A pilot study with ten surgeons was conducted using a laparoscopic simulator, where participants performed a stitching and knot-tying task with and without AR-based notifications.
All participants were able to complete the tasks while wearing the AR glasses. While task completion times were longer in the AR condition, no conclusive differences in perceived workload were observed. User experience and wearing comfort were rated positively, whereas the notifications were perceived as useful but not consistently effective. The findings suggest that lightweight AR glasses are a feasible platform for ergonomic feedback in laparoscopic training and motivate further investigation.
Batz, V; Cavkovski, P; Loebel, J M; Lameski, P; Trajkovik, V; Hansen, C; Herzog, M A
Usability Assessment of Low-cost Sensor Kits for Educational Air Quality Sensing Journal Article
In: 2026, (conditionally accepted).
@article{nokeyc,
title = {Usability Assessment of Low-cost Sensor Kits for Educational Air Quality Sensing},
author = {V Batz and P Cavkovski and J M Loebel and P Lameski and V Trajkovik and C Hansen and M A Herzog},
url = {https://link.springer.com/chapter/10.1007/978-3-032-30542-8_2},
year = {2026},
date = {2026-02-01},
urldate = {2026-02-01},
booktitle = {HCI International (HCII)},
abstract = {This study assesses the usability of the Pulse.Eco Combo Cube v3 particulate‑matter sensor kit and examines its suitability as an educational toolkit for citizen science in schools. The goal is to develop a low-cost DIY sensor kit that can be used for participatory data collection in school MAKER workshops, thereby promoting environmental awareness and environmentally conscious behavior among students. We further show that our design-thinking workflow generalizes to other educational sensing toolkits.},
note = {conditionally accepted},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2025
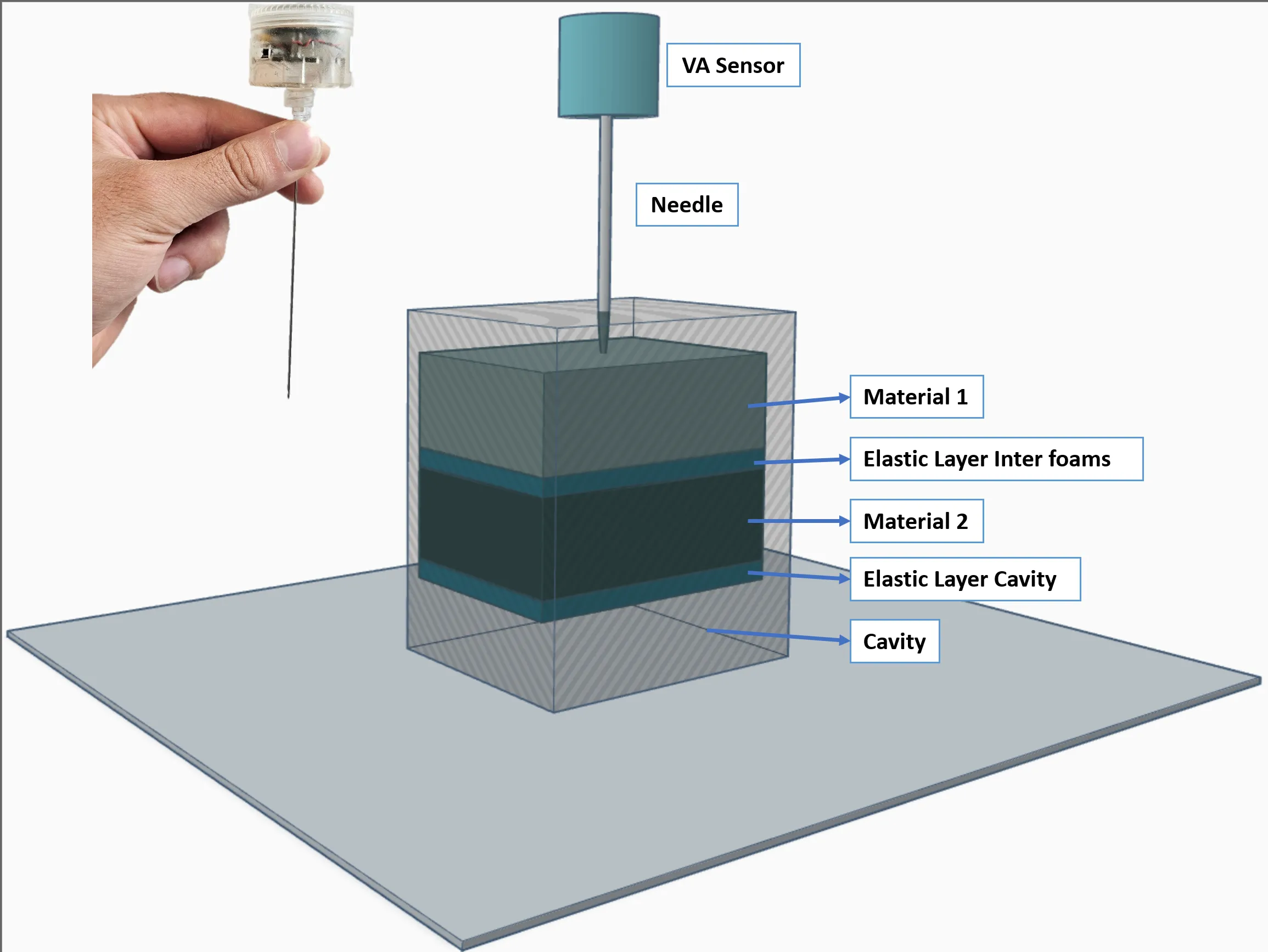
Urrutia, R; Ayman, F; Boese, A; Hansen, C; Illanes, A
Needle Puncture Detection Using Vibroacoustic Sensing in Layered Phantoms Journal Article
In: Current Directions in Biomedical Engineering, vol. 11, iss. 2, pp. 112-115, 2025.
@article{urrutia2025,
title = {Needle Puncture Detection Using Vibroacoustic Sensing in Layered Phantoms},
author = {R Urrutia and F Ayman and A Boese and C Hansen and A Illanes},
doi = {10.1515/cdbme-2025-0329},
year = {2025},
date = {2025-12-01},
urldate = {2026-01-20},
journal = {Current Directions in Biomedical Engineering},
volume = {11},
issue = {2},
pages = {112-115},
abstract = {This study evaluates the use of vibroacoustic (VA)sensing to detect material transitions during needle insertions into layered synthetic phantoms. Experiments were conducted using foams with different pore densities and configurations including internal cavities. Time-domain and wavelet analyses showed that denser foams produced more frequent vibrational events, while less dense foams resulted in sparser signals. In setups with elastic membranes and cavities, differences in time–frequency patterns were observed: high-frequency activity appeared after membrane rupture but was absent in cavity insertions. These results support the use of VA sensing to identify mechanical changes during minimally invasive procedures.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Schreiter, J; Pandi, P; Klank, R; Großer, O S; Hansen, C; Heinrich, F
Mixed Reality Assistance for Needle Insertion under Ultrasound Imaging: A Pilot Study Journal Article
In: Current Directions in Biomedical Engineering, vol. 11, no. 2, pp. 104–107, 2025, ISSN: 2364-5504.
@article{Schreiter2025,
title = {Mixed Reality Assistance for Needle Insertion under Ultrasound Imaging: A Pilot Study},
author = {J Schreiter and P Pandi and R Klank and O S Großer and C Hansen and F Heinrich},
url = {https://www.researchgate.net/publication/399914083_Mixed_Reality_Assistance_for_Needle_Insertion_under_Ultrasound_Imaging_A_Pilot_Study},
doi = {10.1515/cdbme-2025-0327},
issn = {2364-5504},
year = {2025},
date = {2025-12-01},
urldate = {2025-12-01},
journal = {Current Directions in Biomedical Engineering},
volume = {11},
number = {2},
pages = {104–107},
publisher = {Walter de Gruyter GmbH},
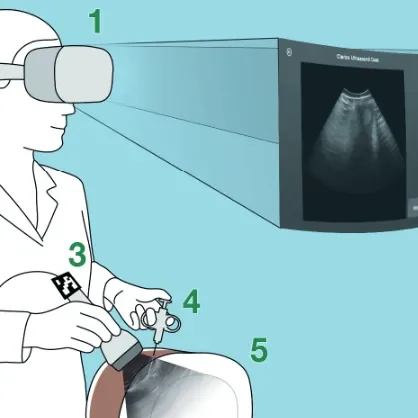
abstract = {Ultrasound (US)-guided needle interventions require precise coordination between imaging and instrument handling, which can be ergonomically challenging with conventional displays. This work presents a mixed reality (MR) prototype that integrates live US and pre-interventional CT data into a video passthrough head-mounted display (HMD), enabling a spatially registered in-situ view and interactive virtual displays. Unlike prior work relying on optical see-through HMDs, our system combines immersive guidance and interactive tools to support image-guided needle insertion. A preliminary user study with six radiologists assessed usability and clinical potential. Results indicate slightly above-average usability, with participants valuing field-of-view integration. User feedback highlighted the need for features such as interactive planning and extended visualizations, e.g. patientspecific anatomy.With these refinements, the prototype shows strong potential to improve ergonomics and spatial awareness during US-guided procedures.
},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Mielke, T; Allgaier, M; Hansen, C; Heinrich, F
Extended Reality Check: Evaluating XR Prototyping for Human-Robot Interaction in Contact-Intensive Tasks Journal Article
In: IEEE Transactions on Visualization and Computer Graphics, vol. 31, iss. 11, pp. 10035 - 10044, 2025.
@article{mielke_extended_2025,
title = {Extended Reality Check: Evaluating XR Prototyping for Human-Robot Interaction in Contact-Intensive Tasks},
author = {T Mielke and M Allgaier and C Hansen and F Heinrich},
doi = {10.1109/TVCG.2025.3616753},
year = {2025},
date = {2025-10-02},
urldate = {2025-10-02},
journal = {IEEE Transactions on Visualization and Computer Graphics},
volume = {31},
issue = {11},
pages = {10035 - 10044},
abstract = {Extended Reality (XR) has the potential to improve efficiency and safety in the user-centered development of human-robot interaction. However, the validity of using XR prototyping for user studies for contact-intensive robotic tasks remains underexplored. These in-contact tasks are particularly relevant due to challenges arising from indirect force perception in robot control. Therefore, in this work, we investigate a representative example of such a task: robotic ultrasound. A user study was conducted to assess the transferability of results from a simulated user study to real-world conditions, comparing two force-assistance approaches. The XR simulation replicates the physical study set-up employing a virtual robotic arm, its control interface, ultrasound imaging, and two force-assistance methods: automation and force visualization. Our results indicate that while differences in force deviation, perceived workload, and trust emerge between real and simulated setups, the overall findings remain consistent. Specifically, partial automation of robot control improves performance and trust while reducing workload, and visual feedback decreases force deviation in both real and simulated conditions. These findings highlight the potential of XR for comparative studies, even in complex robotic tasks.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Mielke, T; Heinrich, F; Hansen, C
Gesturing Towards Efficient Robot Control: Exploring Sensor Placement and Control Modes for Mid-Air Human-Robot Interaction Journal Article
In: 2025.
@article{mielke_gesturing_2025,
title = {Gesturing Towards Efficient Robot Control: Exploring Sensor Placement and Control Modes for Mid-Air Human-Robot Interaction},
author = {T Mielke and F Heinrich and C Hansen},
doi = {10.1109/ICRA55743.2025.11127519},
year = {2025},
date = {2025-09-02},
urldate = {2025-09-02},
booktitle = {2025 IEEE International Conference on Robotics and Automation (ICRA)},
abstract = {While collaborative robots effectively combine robotic precision with human capabilities, traditional control methods such as button presses or hand guidance can be slow and physically demanding. This has led to an increasing interest in natural user interfaces that integrate hand gesturebased interactions for more intuitive and flexible robot control. Therefore, this paper systematically explores mid-air robot control by comparing position and rate control modes with different state-of-the-art and novel sensor placements. A user study was conducted to evaluate each combination in terms of accuracy, task duration, perceived workload, and physical exertion. Our results indicate that position control is more efficient than rate control. Traditional desk-mounted sensors can provide a good balance between accuracy and comfort. However, robot-mounted sensors are a viable alternative for short-term, accurate control with less spatial requirements. Legmounted sensors, while comfortable, pose challenges to handeye coordination. Based on these findings, we provide design implications for improving the usability and comfort of midair human-robot interaction. Future research should extend this evaluation to a wider range of tasks and environments.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Mielke, T; Heinrich, F; Hansen, C
Enhancing AR-to-Robot Registration Accuracy: A Comparative Study of Marker Detection Algorithms and Registration Parameters Journal Article
In: 2025.
@article{mielke_enhancing_2025,
title = {Enhancing AR-to-Robot Registration Accuracy: A Comparative Study of Marker Detection Algorithms and Registration Parameters},
author = {T Mielke and F Heinrich and C Hansen},
doi = {10.1109/ICRA55743.2025.11128039},
year = {2025},
date = {2025-09-02},
urldate = {2025-09-02},
booktitle = {2025 IEEE International Conference on Robotics and Automation (ICRA)},
publisher = {IEEE},
abstract = {Augmented Reality (AR) offers potential for enhancing human-robot collaboration by enabling intuitive interaction and real-time feedback. A crucial aspect of AR-robot integration is accurate spatial registration to align virtual content with the physical robotic workspace. This paper systematically investigates the effects of different tracking techniques and registration parameters on AR-to-robot registration accuracy, focusing on paired-point methods. We evaluate four marker detection algorithms - ARToolkit, Vuforia, ArUco, and retroreflective tracking - analyzing the influence of viewing distance, angle, marker size, point distance, distribution, and quantity. Our results show that ARToolkit provides the highest registration accuracy. While larger markers and positioning registration point centroids close to target locations consistently improved accuracy, other factors such as point distance and quantity were highly dependent on the tracking techniques used. Additionally, we propose an effective refinement method using point cloud registration, significantly improving accuracy by integrating data from points recorded between registration locations. These findings offer practical guidelines for enhancing AR-robot registration, with future work needed to assess the transferability to other AR devices and robots.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Joeres, F; Paetz, T; Hansen, C; Schenk, A
The necessity of parallel needle placement for tumor ablation using irreversible electroporation: a myth? Proceedings Article
In: CARS 2025—Computer Assisted Radiology and Surgery Proceedings of the 39th International Congress and Exhibition Berlin, Germany, June 17–20, 2025 , pp. 90–91, 2025.
@inproceedings{Joeres.2025,
title = {The necessity of parallel needle placement for tumor ablation using irreversible electroporation: a myth?},
author = {F Joeres and T Paetz and C Hansen and A Schenk},
url = {https://link.springer.com/article/10.1007/s11548-025-03373-6},
doi = {https://doi.org/10.1007/s11548-025-03373-6},
year = {2025},
date = {2025-05-29},
urldate = {2025-05-29},
booktitle = {CARS 2025—Computer Assisted Radiology and Surgery Proceedings of the 39th International Congress and Exhibition Berlin, Germany, June 17–20, 2025
},
pages = {90–91},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Schwenderling, L; Hanke, L; Holst, U; Huettl, F; Joeres, F; Huber, T; Hansen, C
Toward structured abdominal examination training using augmented reality Journal Article
In: International Journal of Computer Assisted Radiology and Surgery, vol. 20, no. 5, pp. 949–958, 2025, ISSN: 1861-6429.
@article{schwenderling_toward_2025,
title = {Toward structured abdominal examination training using augmented reality},
author = {L Schwenderling and L Hanke and U Holst and F Huettl and F Joeres and T Huber and C Hansen},
url = {https://doi.org/10.1007/s11548-024-03311-y},
doi = {10.1007/s11548-024-03311-y},
issn = {1861-6429},
year = {2025},
date = {2025-05-01},
urldate = {2025-05-01},
journal = {International Journal of Computer Assisted Radiology and Surgery},
volume = {20},
number = {5},
pages = {949–958},
abstract = {Structured abdominal examination is an essential part of the medical curriculum and surgical training, requiring a blend of theory and practice from trainees. Current training methods, however, often do not provide adequate engagement, fail to address individual learning needs or do not cover rare diseases.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Mielke, T; Allgaier, M; Schott, D; Hansen, C; Heinrich, F
Virtual Studies, Real Results? Assessing the Impact of Virtualization on Human-Robot Interaction Proceedings Article
In: Proceedings of the Extended Abstracts of the CHI Conference on Human Factors in Computing Systems, pp. 1–8, ACM, Yokohama Japan, 2025, ISBN: 979-8-4007-1395-8.
@inproceedings{mielke_virtual_2025,
title = {Virtual Studies, Real Results? Assessing the Impact of Virtualization on Human-Robot Interaction},
author = {T Mielke and M Allgaier and D Schott and C Hansen and F Heinrich},
url = {https://dl.acm.org/doi/10.1145/3706599.3719724},
doi = {10.1145/3706599.3719724},
isbn = {979-8-4007-1395-8},
year = {2025},
date = {2025-04-01},
urldate = {2025-04-01},
booktitle = {Proceedings of the Extended Abstracts of the CHI Conference on Human Factors in Computing Systems},
pages = {1–8},
publisher = {ACM},
address = {Yokohama Japan},
abstract = {Extended Reality (XR) shows potential for human-centered evaluation of real-world scenarios and could improve efficiency and safety in robotic research. However, the validity of XR Human-Robot Interaction (HRI) studies remains underexplored. This paper investigates the transferability of HRI studies across virtualization levels for three tasks. Our results indicate XR study validity is task-specific, with task virtualization as a key influencing factor. Partially virtualized settings with virtual tasks and a real robot, as well as fully virtualized setups with a simulated robot, yielded results comparable to real setups for pick-and-place and robotic ultrasound. However, for precision-dependent peg-in-hole, differences were observed between real and virtualized conditions regarding completion time, perceived workload, and ease. Demonstrating the task dependency of XR transferability and comparing virtualization levels, our work takes an important step in assessing XR study validity. Future work should isolate factors affecting transferability and assess relative validity in the absence of absolute validity.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Schwenderling, L; Schotte, M; Joeres, F; Heinrich, F; Hanke, L; Huettl, F; Huber, T; Hansen, C
Teach Me Where to Look: Dual-task Attention Training in Augmented Reality Proceedings Article
In: Proceedings of the Extended Abstracts of the CHI Conference on Human Factors in Computing Systems, pp. 1–8, ACM, Yokohama Japan, 2025, ISBN: 979-8-4007-1395-8.
@inproceedings{schwenderling_teach_2025,
title = {Teach Me Where to Look: Dual-task Attention Training in Augmented Reality},
author = {L Schwenderling and M Schotte and F Joeres and F Heinrich and L Hanke and F Huettl and T Huber and C Hansen},
url = {https://dl.acm.org/doi/10.1145/3706599.3720198},
doi = {10.1145/3706599.3720198},
isbn = {979-8-4007-1395-8},
year = {2025},
date = {2025-04-01},
urldate = {2025-04-01},
booktitle = {Proceedings of the Extended Abstracts of the CHI Conference on Human Factors in Computing Systems},
pages = {1–8},
publisher = {ACM},
address = {Yokohama Japan},
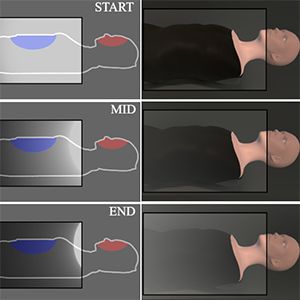
abstract = {Regular eye contact is essential in medicine to recognize signs of pain. However, it is difficult to remember this during training as attention is tied up in learning. While augmented reality (AR) has shown promising results for medical education, there is no training for attention allocation yet. Therefore, three auditory and three visual attention guidance tools in AR are evaluated for their use in medical dual-task training settings. In expert reviews with six participants in human-computer interaction and medical didactics, advantages, disadvantages, and refinements for the cues were developed. For visual cues, an overt but less occluding cue was preferred for constant visibility of the primary task. A more diegetic cue design was proposed for the auditory cues to use a patient simulation as a reminder of the regular face glance. In general, several cues were found to be suitable for gaze guidance training, requiring only minor changes for improvement.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Heinrich, F; Schott, D; Schwenderling, L; Hansen, C
Do You See What I See? Evaluating Relative Depth Judgments Between Real and Virtual Projections Proceedings Article
In: Proceedings of the Extended Abstracts of the CHI Conference on Human Factors in Computing Systems, pp. 1–8, Association for Computing Machinery, New York, NY, USA, 2025, ISBN: 979-8-4007-1395-8.
@inproceedings{heinrich_you_2025,
title = {Do You See What I See? Evaluating Relative Depth Judgments Between Real and Virtual Projections},
author = {F Heinrich and D Schott and L Schwenderling and C Hansen},
url = {https://doi.org/10.1145/3706599.3720157},
doi = {10.1145/3706599.3720157},
isbn = {979-8-4007-1395-8},
year = {2025},
date = {2025-04-01},
urldate = {2025-04-01},
booktitle = {Proceedings of the Extended Abstracts of the CHI Conference on Human Factors in Computing Systems},
pages = {1–8},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
series = {CHI EA '25},
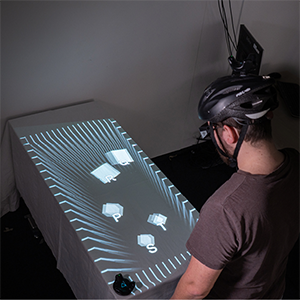
abstract = {Projector-based augmented reality (AR) is promising in different domains with less issues in discomfort or shortage of space. However, due to limitations like high costs and cumbersome calibration, this AR modality remains underused. To address this problem, a stereoscopic projector-based AR simulation was implemented for a cost-effective video see-through AR headset. To evaluate the validity of this simulation, a relative depth judgment experiment was conducted to compare this method with a physical projection system. Consistent results suggest that a known interaction effect between visualization and disparity mode could be successfully reproduced using both the physical projection and the virtual simulation. In addition, first findings indicate that there are no significant differences between these projection modalities. The results indicate that other perception-related effects observed for projector-based AR may also be applicable to virtual projection simulations and that future findings determined using only these simulations may also be applicable to real projections.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Kunz, M; Schott, D; Wunderling, T; Halloul, M; Hansen, C; Albrecht, A; Braun-Dullaeus, R
Embryonic heart development as an immersive experience: Unveiling learning effects and influential factors in virtual learning environments Journal Article
In: Comput. Biol. Med., vol. 187, no. C, 2025, ISSN: 0010-4825.
@article{kunz_embryonic_2025,
title = {Embryonic heart development as an immersive experience: Unveiling learning effects and influential factors in virtual learning environments},
author = {M Kunz and D Schott and T Wunderling and M Halloul and C Hansen and A Albrecht and R Braun-Dullaeus},
url = {https://doi.org/10.1016/j.compbiomed.2024.109638},
doi = {10.1016/j.compbiomed.2024.109638},
issn = {0010-4825},
year = {2025},
date = {2025-04-01},
urldate = {2025-04-01},
journal = {Comput. Biol. Med.},
volume = {187},
number = {C},
abstract = {As the quality and availability of Virtual Reality (VR) technologies improve, their potential applications in medical education, particularly VR Learning Environments (VRLEs), are increasingly explored. VRLEs offer a dynamic platform where educators and students can interact, access materials, and engage in learning beyond traditional classrooms. However, questions remain about their long-term learning effects and potential confounding factors. This study investigates these aspects through a VR application designed for teaching heart embryology. For this reason we conducted a user study with medical students in their early years of training (N = 143). Our findings reveal significant short-term and sustained learning outcomes two to four weeks following a single VR session. Importantly, these outcomes appear largely independent of users’ technical affinity and are minimally influenced by their immersion tendencies. Instead, the quality of the VRLE and its user experience emerge as critical factors. These results underscore the efficacy of well-designed VRLEs in higher education and highlight key areas for future development.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Schreiter, J; Heinrich, F; Hatscher, B; Schott, D; Hansen, C
Multimodal human–computer interaction in interventional radiology and surgery: a systematic literature review Journal Article
In: International Journal of Computer Assisted Radiology and Surgery, vol. 20, no. 4, pp. 807–816, 2025, ISSN: 1861-6429.
@article{schreiter_multimodal_2025,
title = {Multimodal human–computer interaction in interventional radiology and surgery: a systematic literature review},
author = {J Schreiter and F Heinrich and B Hatscher and D Schott and C Hansen},
url = {https://doi.org/10.1007/s11548-024-03263-3},
doi = {10.1007/s11548-024-03263-3},
issn = {1861-6429},
year = {2025},
date = {2025-04-01},
urldate = {2025-04-01},
journal = {International Journal of Computer Assisted Radiology and Surgery},
volume = {20},
number = {4},
pages = {807–816},
abstract = {As technology advances, more research dedicated to medical interactive systems emphasizes the integration of touchless and multimodal interaction (MMI). Particularly in surgical and interventional settings, this approach is advantageous because it maintains sterility and promotes a natural interaction. Past reviews have focused on investigating MMI in terms of technology and interaction with robots. However, none has put particular emphasis on analyzing these kind of interactions for surgical and interventional scenarios.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Mielke, T; Heinrich, F; Hansen, C
SensARy Substitution: Augmented Reality Techniques to Enhance Force Perception in Touchless Robot Control Journal Article
In: IEEE Transactions on Visualization and Computer Graphics, vol. 31, no. 5, pp. 3235–3244, 2025, ISSN: 1941-0506.
@article{mielke_sensary_2025,
title = {SensARy Substitution: Augmented Reality Techniques to Enhance Force Perception in Touchless Robot Control},
author = {T Mielke and F Heinrich and C Hansen},
url = {https://ieeexplore.ieee.org/document/10926846},
doi = {10.1109/TVCG.2025.3549856},
issn = {1941-0506},
year = {2025},
date = {2025-03-14},
urldate = {2025-05-01},
journal = {IEEE Transactions on Visualization and Computer Graphics},
volume = {31},
number = {5},
pages = {3235–3244},
abstract = {The lack of haptic feedback in touchless human-robot interaction is critical in applications such as robotic ultrasound, where force perception is crucial to ensure image quality. Augmented reality (AR) is a promising tool to address this limitation by providing sensory substitution through visual or vibrotactile feedback. The implementation of visual force feedback requires consideration not only of feedback design but also of positioning. Therefore, we implemented two different visualization types at three different positions and investigated the effects of vibrotactile feedback on these approaches. Furthermore, we examined the effects of multimodal feedback compared to visual or vibrotactile output alone. Our results indicate that sensory substitution eases the interaction in contrast to a feedback-less baseline condition, with the presence of visual support reducing average force errors and being subjectively preferred by the participants. However, the more feedback was provided, the longer users needed to complete their tasks. Regarding visualization design, a 2D bar visualization reduced force errors compared to a 3D arrow concept. Additionally, the visualizations being displayed directly on the ultrasound screen were subjectively preferred. With findings regarding feedback modality and visualization design our work represents an important step toward sensory substitution for touchless human-robot interaction.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Herbrich, W; Zittlau, P; Joeres, F; Hansen, C
Prototype development of a cross-reality digital twin ecosystem: the web, open source and open data Proceedings Article
In: 2025 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), pp. 459–462, 2025.
@inproceedings{herbrich_prototype_2025,
title = {Prototype development of a cross-reality digital twin ecosystem: the web, open source and open data},
author = {W Herbrich and P Zittlau and F Joeres and C Hansen},
url = {https://ieeexplore.ieee.org/abstract/document/10972895},
doi = {10.1109/VRW66409.2025.00100},
year = {2025},
date = {2025-03-01},
urldate = {2025-03-01},
booktitle = {2025 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW)},
pages = {459–462},
abstract = {This work contributes to a broader initiative aimed at transforming a former industrial port area into a dynamic Knowledge Transfer Space (KTS). To support this transformation, we explore the development of a cross-reality (CR) digital twin of the port area, which integrates user interfaces with varying degrees of virtuality. We evaluate different web technologies, focusing on the balance between accessibility, immersion, scalability, and performance. By comparing client-side rendering with pixel streaming approaches, we aim to identify suitable solutions for prototyping a CR digital twin ecosystem. The development of a prototype is ongoing, based on a client-side rendering approach. The outcomes contribute to developing an open and transferable CR digital twin applicable to similar urban projects in other cities.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Allgaier, M; Dangszat, E; Huettl, F; Hanke, L; Huber, T; Preim, B; Hansen, C
Impact of Input and Output Devices on a Virtual Ultrasound Training Proceedings Article
In: 2025 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), pp. 937–941, IEEE, Saint Malo, France, 2025, ISBN: 979-8-3315-1484-6.
@inproceedings{allgaier_impact_2025,
title = {Impact of Input and Output Devices on a Virtual Ultrasound Training},
author = {M Allgaier and E Dangszat and F Huettl and L Hanke and T Huber and B Preim and C Hansen},
url = {https://ieeexplore.ieee.org/document/10972939/},
doi = {10.1109/VRW66409.2025.00191},
isbn = {979-8-3315-1484-6},
year = {2025},
date = {2025-03-01},
urldate = {2025-03-01},
booktitle = {2025 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW)},
pages = {937–941},
publisher = {IEEE},
address = {Saint Malo, France},
abstract = {Performing ultrasound requires mental skills that have to be trained hands on. Virtual simulations can be employed to provide novice surgeons with a safe training environment prior to performing ultrasound on the patient. For both input and output there is a wide range of devices that are used in existing ultrasound simulations. Because the devices have their limitations and benefits regarding realism, costs, and access, we compared three technical setups: desktop with mouse interaction, desktop with a haptic device, and virtual reality with a haptic device. In a user study with 19 participants we investigated the usability and assessed qualitative user feedback in a semi-structured interview. Significant differences regarding usability and training time were found between both versions with the haptic device and the desktop with mouse version. Based on the feedback, using a haptic device seems to be more relevant than the two output devices in this training case.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Razavizadeh, S; Kofler, M; Kunz, M; Kempfert, J; Braun-Dullaeus, R; Weidling, J; Preim, B; Hansen, C
A virtual patient authoring tool for transcatheter aortic valve replacement Journal Article
In: International Journal of Computer Assisted Radiology and Surgery, vol. 20, no. 2, pp. 379–389, 2025, ISSN: 1861-6429.
@article{razavizadeh_virtual_2025,
title = {A virtual patient authoring tool for transcatheter aortic valve replacement},
author = {S Razavizadeh and M Kofler and M Kunz and J Kempfert and R Braun-Dullaeus and J Weidling and B Preim and C Hansen},
url = {https://doi.org/10.1007/s11548-024-03293-x},
doi = {10.1007/s11548-024-03293-x},
issn = {1861-6429},
year = {2025},
date = {2025-02-01},
urldate = {2025-02-01},
journal = {International Journal of Computer Assisted Radiology and Surgery},
volume = {20},
number = {2},
pages = {379–389},
abstract = {Computer-based medical training scenarios, derived from patient’s records, often lack variability, modifiability, and availability. Furthermore, generating image datasets and creating scenarios is resource-intensive. Therefore, patient authoring tools for rapid dataset-independent creation of virtual patients (VPs) is a pressing need.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Schott, D; Kunz, M; Albrecht, A; Braun-Dullaeus, R; Hansen, C
Too Heart to Handle? Exploring Self-Directed And Collaborative Virtual Learning Environments in Anatomy Education. Journal Article
In: EuroVis 2025 - Dirk Bartz Prize, 2025, (Artwork Size: 5 pages ISBN: 9783038682813 Publisher: The Eurographics Association).
@article{schott_too_2025,
title = {Too Heart to Handle? Exploring Self-Directed And Collaborative Virtual Learning Environments in Anatomy Education.},
author = {D Schott and M Kunz and A Albrecht and R Braun-Dullaeus and C Hansen},
url = {https://diglib.eg.org/handle/10.2312/evm20251973},
doi = {10.2312/EVM.20251973},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
journal = {EuroVis 2025 - Dirk Bartz Prize},
abstract = {The integration of Extended Reality (XR) into medical education represents a transformative shift, particularly in anatomy training, where immersive simulations enhance cognitive engagement and knowledge retention. The developing heart is characterized by rapid morphological changes within a short time frame, which poses a significant pedagogical challenge. Conventional 2D imaging and static models often fail to convey these processes, limiting learners' ability to conceptualize critical spatial relationships-a barrier in understanding congenital anomalies. To address these limitations, this work leverages XRdriven visualization and interaction paradigms to create virtual learning environments. Based on this, we propose methods for designing XR educational modules that adapt to both collaborative and self-directed learning contexts, using embryonic cardiogenesis as an illustrating case study. We present findings from mixed-methods user studies involving a total of 264 students, along with feedback from lecturers, highlighting the importance of an iterative, user-centered design approach.},
note = {Artwork Size: 5 pages
ISBN: 9783038682813
Publisher: The Eurographics Association},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Urrutia, R; Espejo, D; Guerra, M; Vio, K; Sühn, T; Esmaeili, N; Boese, A; Fuentealba, P; Illanes, A; Hansen, C; Poblete, V
Exploring Deep Clustering Methods in Vibro-Acoustic Sensing for Enhancing Biological Tissue Characterization Journal Article
In: IEEE Access, vol. 13, pp. 80395–80406, 2025, ISSN: 2169-3536.
@article{urrutia_exploring_2025,
title = {Exploring Deep Clustering Methods in Vibro-Acoustic Sensing for Enhancing Biological Tissue Characterization},
author = {R Urrutia and D Espejo and M Guerra and K Vio and T Sühn and N Esmaeili and A Boese and P Fuentealba and A Illanes and C Hansen and V Poblete},
url = {https://ieeexplore.ieee.org/document/10981752/},
doi = {10.1109/ACCESS.2025.3566280},
issn = {2169-3536},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
journal = {IEEE Access},
volume = {13},
pages = {80395–80406},
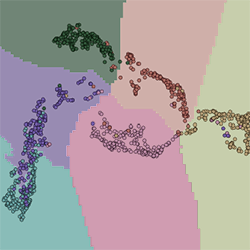
abstract = {Nonlinear dimensionality reduction techniques, often referred to as manifold learning, are increasingly valuable for data visualization and unsupervised clustering. In the context of surgery and medicine, these methods facilitate the analysis of complex datasets, enabling pattern recognition in surgical data. This study explores the characterization of six tissue types through manifold learning and unsupervised clustering, utilizing vibro-acoustic (VA) signals collected from manual palpation experiments. A wireless sensor mounted at the tip of a surgical instrument was used to acquire 1,680 VA signals, which were processed using Fourier transform and cepstral analysis for feature extraction. We assessed the performance of two dimensionality reduction techniques: uniform manifold approximation and projection (UMAP) and variational autoencoder (VAE). Results indicate that cepstral features combined with UMAP yield superior clustering performance compared to VAE, achieving higher classification accuracy ( 92 % vs. 87 % ) and better-defined clusters with greater compactness. The observed differences in performance are linked to the intrinsic properties of the tissues, particularly surface characteristics such as friction and moisture, which affect signal consistency. Additionally, we compared our approach with previous works, including a study utilizing the same dataset, where our methodology demonstrated improved accuracy. Future research will focus on refining the VAE model, increasing the diversity of tissue samples, and validating the proposed approach in real surgical settings to enhance its applicability in minimally invasive surgery.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Bashkanov, O; Engelage, L; Behnel, N; Ehrlich, P; Hansen, C; Rak, M
Multimodal Data Fusion with Irregular PSA Kinetics for Automated Prostate Cancer Grading Journal Article
In: 2025.
@article{bashkanov_multimodal_2025,
title = {Multimodal Data Fusion with Irregular PSA Kinetics for Automated Prostate Cancer Grading},
author = {O Bashkanov and L Engelage and N Behnel and P Ehrlich and C Hansen and M Rak},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
keywords = {},
pubstate = {published},
tppubtype = {article}
}

Hanke, L; Schwoerer, P; Huettl, F; Vradelis, L; Strelow, K; Boedecker, C; Saalfeld, P; Chheang, V; Buggenhagen, H; Lang, H; Hansen, C; Huber, T
Use of an Immersive Virtual Reality Application to Educate Medical Students in Patient Handover Journal Article
In: 2025.
@article{hanke_use_2025,
title = {Use of an Immersive Virtual Reality Application to Educate Medical Students in Patient Handover},
author = {L Hanke and P Schwoerer and F Huettl and L Vradelis and K Strelow and C Boedecker and P Saalfeld and V Chheang and H Buggenhagen and H Lang and C Hansen and T Huber},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
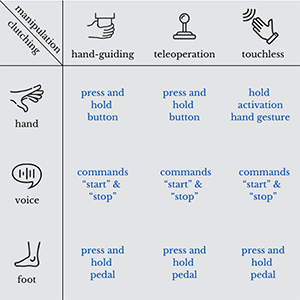
Schreiter, J; Mielke, T; Georgiades, M; Pech, M; Hansen, C; Heinrich, F
Exploring Interaction Concepts for the Manipulation of a Collaborative Robot: A Comparative Study Proceedings Article
In: ACM/IEEE International Conference on Human-Robot Interaction, pp. 55–64, IEEE Press, Melbourne, Australia, 2025.
@inproceedings{schreiter_exploring_2025,
title = {Exploring Interaction Concepts for the Manipulation of a Collaborative Robot: A Comparative Study},
author = {J Schreiter and T Mielke and M Georgiades and M Pech and C Hansen and F Heinrich},
url = {https://ieeexplore.ieee.org/document/10974113},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
booktitle = {ACM/IEEE International Conference on Human-Robot Interaction},
pages = {55–64},
publisher = {IEEE Press},
address = {Melbourne, Australia},
series = {HRI '25},
abstract = {Robotic systems have the potential to enhance a wide range of domains, such as medical workflows, by automating individual steps of complex processes. However, human-robot interaction (HRI) is of critical importance, as effective collaboration between humans and robots is essential even in highly automated environments. Recent research has predominantly focused on the development of interaction methods rather than systematically comparing existing approaches. Therefore, we conducted a user study (n=20) to compare different HRI concepts for end effector manipulation combined with clutching mechanisms for manipulation activation in an alignment task using the example of robotic ultrasound (US). Manipulation methods included hand-guiding, teleoperation, and touchless interaction, while clutching mechanisms were realized through hand, voice, and foot interaction. The results indicate advantages of hand-guiding for manipulation. While no significant differences were observed between clutching mechanisms, strong evidence suggests comparable performance across these modalities. Notably, significant interaction effects on perceived workload reveal that the optimal clutching mechanism depends on the selected manipulation technique. This work underscores the critical importance of selecting appropriate HRI concepts and understanding the dependencies of manipulation techniques with clutching mechanisms. While our study included the usage of a robotic US, the insights gained are broadly transferable across various domains involving robotic manipulation tasks in human-robot collaboration.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
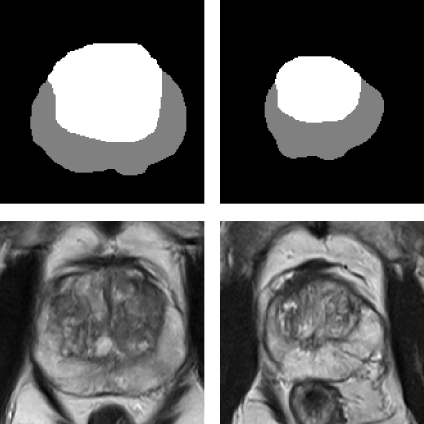
Bashkanov, O; Rak, M; Engelage, L; Hansen, C
Augmenting Prostate MRI Dataset with Synthetic Volumetric Images from Zone-Conditioned Diffusion Generative Model Proceedings Article
In: Mukhopadhyay, A; Oksuz, Ilkay; Engelhardt, Sandy; Mehrof, Dorit; Yuan, Yixuan (Ed.): Deep Generative Models, pp. 160–168, Springer Nature Switzerland, Cham, 2025, ISBN: 978-3-031-72744-3.
@inproceedings{bashkanov_augmenting_2025,
title = {Augmenting Prostate MRI Dataset with Synthetic Volumetric Images from Zone-Conditioned Diffusion Generative Model},
author = {O Bashkanov and M Rak and L Engelage and C Hansen},
editor = {A Mukhopadhyay and Ilkay Oksuz and Sandy Engelhardt and Dorit Mehrof and Yixuan Yuan},
doi = {10.1007/978-3-031-72744-3_16},
isbn = {978-3-031-72744-3},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
booktitle = {Deep Generative Models},
pages = {160–168},
publisher = {Springer Nature Switzerland},
address = {Cham},
abstract = {The need for artificial intelligence (AI)-driven computer-assist ed diagnosis (CAD) tools drives up the demand for large high-quality datasets in medical imaging. However, collecting the necessary amount of data is often impractical due to patient privacy concerns or restricted time for medical annotation. Recent advances in generative models in medical imaging with a focus on diffusion-based techniques could provide realistic-looking synthetic samples as a supplement for real data. In this work, we study whether synthetic volumetric MRIs generated by the diffusion model can be used to train downstream models, e.g., semantic segmentation. We can create an arbitrarily large dataset with ground truth by conditioning the diffusion model with a segmentation mask. Thus, the additional synthetic data can be used to control the dataset diversity. Experiments revealed that downstream tasks profit from additional synthetic data. However, the effect will eventually diminish when sufficient real samples are available. We showcase the strength of the synthetic data and provide practical recommendations for using the generated data in zonal prostate segmentation.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Batz, V; Liedtke, V B; Lameski, P; Trajkovik, V; Hußlein, S; Hansen, C; Herzog, M A
Enhancing Public Awareness of Air Quality: Evaluating Communication Strategies and Design Prototypes Using a Design-Based Implementation Research Approach Proceedings Article
In: International Conference on Human-Computer Interaction, pp. 3–25, Springer 2025.
@inproceedings{batz2025enhancing,
title = {Enhancing Public Awareness of Air Quality: Evaluating Communication Strategies and Design Prototypes Using a Design-Based Implementation Research Approach},
author = {V Batz and V B Liedtke and P Lameski and V Trajkovik and S Hußlein and C Hansen and M A Herzog},
url = {https://link.springer.com/chapter/10.1007/978-3-031-93221-2_1},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
booktitle = {International Conference on Human-Computer Interaction},
pages = {3–25},
organization = {Springer},
abstract = {Despite the health risks associated with air pollution and the availability of data, public awareness of air quality remains limited. This paper examines communication strategies to enhance awareness in Germany and North Macedonia. Using the Design-Based Implementation Research approach, literature reviews, stakeholder interviews and surveys were conducted with 307 participants to identify knowledge gaps and effective methods.
Three citizen workshops led to the development and evaluation of five design prototypes, including an interactive installation (“Pollution Booth”), a VR application (“Visible Particulate Matter”), and a gamified learning experience (“End Game”). These prototypes addressed information accessibility, data representation, and environmentally conscious behavior. The results show that region-specific communication, interactive designs, and passive information methods in public spaces significantly improve the perception and understanding of air pollution data. Gamified approaches, such as the “End Game” prototype, were particularly effective in educating children about air pollution.
Thirty-two requirements for effective educational strategies were identified, including simplified data visualization, reduced content, and personalized information. The findings highlight the importance of local and personalized approaches, as well as methods for collective knowledge sharing, in promoting awareness and environmentally friendly behavior. Future work should further explore the long-term engagement and sustainable impact of such communication strategies.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Three citizen workshops led to the development and evaluation of five design prototypes, including an interactive installation (“Pollution Booth”), a VR application (“Visible Particulate Matter”), and a gamified learning experience (“End Game”). These prototypes addressed information accessibility, data representation, and environmentally conscious behavior. The results show that region-specific communication, interactive designs, and passive information methods in public spaces significantly improve the perception and understanding of air pollution data. Gamified approaches, such as the “End Game” prototype, were particularly effective in educating children about air pollution.
Thirty-two requirements for effective educational strategies were identified, including simplified data visualization, reduced content, and personalized information. The findings highlight the importance of local and personalized approaches, as well as methods for collective knowledge sharing, in promoting awareness and environmentally friendly behavior. Future work should further explore the long-term engagement and sustainable impact of such communication strategies.
2024

Joeres, F; Zittlau, P; Herbrich, W; Heinrich, F; Rose, G; Hansen, C
Concept development of a cross-reality ecosystem for urban knowledge transfer spaces Proceedings Article
In: 2024 IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct), pp. 166–169, 2024, (ISSN: 2771-1110).
@inproceedings{joeres_concept_2024,
title = {Concept development of a cross-reality ecosystem for urban knowledge transfer spaces},
author = {F Joeres and P Zittlau and W Herbrich and F Heinrich and G Rose and C Hansen},
url = {https://ieeexplore.ieee.org/abstract/document/10765174},
doi = {10.1109/ISMAR-Adjunct64951.2024.00043},
year = {2024},
date = {2024-10-01},
urldate = {2024-10-01},
booktitle = {2024 IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct)},
pages = {166–169},
abstract = {This paper presents the development of a cross-reality (CR) ecosystem designed for an urban knowledge transfer space (KTS) in a post-industrial urban environment. The project is part of a larger initiative aimed at transforming a former industrial river port into a dynamic KTS, facilitating interactions between scientific, commercial, residential, and cultural stakeholders. Our research explores the potential of multimodal mixed reality (XR) technologies to enhance engagement with the content and stakeholders of the KTS. Through a three-phase process, we identified key stakeholders and their target audiences, selected appropriate XR technologies, and developed initial use cases that integrate web applications, mobile augmented reality (AR), and XR head-mounted displays. The preliminary findings indicate that these technologies can effectively cater to diverse user groups, providing different levels of virtuality and interaction. However, challenges remain, particularly in stakeholder engagement and the evolving nature of the KTS initiative. Ongoing work includes the development of a Web-XR-based prototype, which will be iteratively refined to better meet user needs and adapt to future technological advancements. This research contributes to the understanding of how CR technologies can be employed in urban transformation processes, offering insights into the design of flexible and scalable CR ecosystems.},
note = {ISSN: 2771-1110},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Hanke, L; Vradelis, L; Boedecker, C; Griesinger, J; Demare, T; Lindemann, N; Huettl, F; Chheang, V; Saalfeld, P; Wachter, N; Wollstädter, J; Spranz, M; Lang, H; Hansen, C; Huber, T
Immersive virtual reality for interdisciplinary trauma management – initial evaluation of a training tool prototype Journal Article
In: BMC Medical Education, vol. 24, no. 1, pp. 769, 2024, ISSN: 1472-6920.
@article{hanke_immersive_2024,
title = {Immersive virtual reality for interdisciplinary trauma management – initial evaluation of a training tool prototype},
author = {L Hanke and L Vradelis and C Boedecker and J Griesinger and T Demare and N Lindemann and F Huettl and V Chheang and P Saalfeld and N Wachter and J Wollstädter and M Spranz and H Lang and C Hansen and T Huber},
url = {https://doi.org/10.1186/s12909-024-05764-w},
doi = {10.1186/s12909-024-05764-w},
issn = {1472-6920},
year = {2024},
date = {2024-07-01},
urldate = {2024-07-01},
journal = {BMC Medical Education},
volume = {24},
number = {1},
pages = {769},
abstract = {Emergency care of critically ill patients in the trauma room is an integral part of interdisciplinary work in hospitals. Live threatening injuries require swift diagnosis, prioritization, and treatment; thus, different medical specialties need to work together closely for optimal patient care. Training is essential to facilitate smooth performance. This study presents a training tool for familiarization with trauma room algorithms in immersive virtual reality (VR), and a first qualitative assessment.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
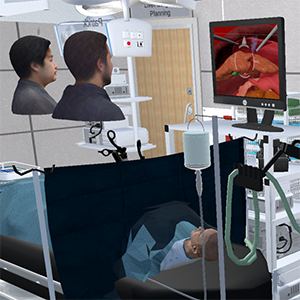
Chheang, V; Schott, D; Saalfeld, P; Vradelis, L; Huber, T; Huettl, F; Lang, H; Preim, B; Hansen, C
Advanced liver surgery training in collaborative VR environments Journal Article
In: Computers & Graphics, vol. 119, pp. 103879, 2024, ISSN: 0097-8493.
@article{chheang_advanced_2024,
title = {Advanced liver surgery training in collaborative VR environments},
author = {V Chheang and D Schott and P Saalfeld and L Vradelis and T Huber and F Huettl and H Lang and B Preim and C Hansen},
url = {https://www.sciencedirect.com/science/article/pii/S0097849324000050},
doi = {10.1016/j.cag.2024.01.006},
issn = {0097-8493},
year = {2024},
date = {2024-04-01},
urldate = {2024-04-01},
journal = {Computers & Graphics},
volume = {119},
pages = {103879},
abstract = {Virtual surgical training systems are crucial for enabling mental preparation, supporting decision-making, and improving surgical skills. Many virtual surgical training environments focus only on training for a specific medical skill and take place in a single virtual room. However, surgical education and training include the planning of procedures as well as interventions in the operating room context. Moreover, collaboration among surgeons and other medical professionals is only applicable to a limited extent. This work presents a collaborative VR environment similar to a virtual teaching hospital to support surgical training and interprofessional collaboration in a co-located or remote environment. The environment supports photo-realistic avatars and scenarios ranging from planning to training procedures in the virtual operating room. It includes a lobby, a virtual surgical planning room with four surgical planning stations, laparoscopic liver surgery training with the integration of laparoscopic surgical instruments, and medical training scenarios for interprofessional team training in a virtual operating room. Each component was evaluated by domain experts as well as in a series of user studies, providing insights on usability, usefulness, and potential research directions. The proposed environment may serve as a foundation for future medical training simulators.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
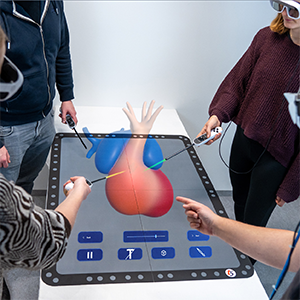
Schott, D; Kunz, M; Mandel, J; Schwenderling, L; Braun-Dullaeus, R; Hansen, C
An AR-Based Multi-User Learning Environment for Anatomy Seminars Proceedings Article
In: 2024 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), pp. 949–950, IEEE, Orlando, FL, USA, 2024, ISBN: 979-8-3503-7449-0.
@inproceedings{schott_ar-based_2024,
title = {An AR-Based Multi-User Learning Environment for Anatomy Seminars},
author = {D Schott and M Kunz and J Mandel and L Schwenderling and R Braun-Dullaeus and C Hansen},
url = {https://ieeexplore.ieee.org/document/10536568/},
doi = {10.1109/VRW62533.2024.00271},
isbn = {979-8-3503-7449-0},
year = {2024},
date = {2024-03-01},
urldate = {2024-03-01},
booktitle = {2024 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW)},
pages = {949–950},
publisher = {IEEE},
address = {Orlando, FL, USA},
abstract = {Understanding the intricate and rapid changes in shape during em-bryonic formation is vital for medical students. Using the example of embryonic human heart development, we introduce an AR-based multi-user approach to enhance understanding and foster a participatory learning environment. Through a user-centered approach, we created a prototype accommodating two player roles and enabling multi-modal inputs to encourage dynamic group discussions. We in-vited four anatomy experts to evaluate three system configurations in an interdisciplinary workshop to assess the feasibility of integration into anatomy seminars. The gathered data and feedback indicate the potential of our collaborative concept for integration into the medical curriculum.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Schwenderling, L; Herbrich, W; Joeres, F; Hansen, C
A Novel Framework for Hand Visualization in Web-Based Collaborative XR Proceedings Article
In: 2024 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), pp. 18–23, IEEE, Orlando, FL, USA, 2024, ISBN: 979-8-3503-7449-0.
@inproceedings{schwenderling_novel_2024,
title = {A Novel Framework for Hand Visualization in Web-Based Collaborative XR},
author = {L Schwenderling and W Herbrich and F Joeres and C Hansen},
url = {https://ieeexplore.ieee.org/document/10536317/},
doi = {10.1109/VRW62533.2024.00010},
isbn = {979-8-3503-7449-0},
year = {2024},
date = {2024-03-01},
urldate = {2024-03-01},
booktitle = {2024 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW)},
pages = {18–23},
publisher = {IEEE},
address = {Orlando, FL, USA},
abstract = {Many extended reality (XR) applications are platform-specific, making accessibility and cross-platform collaboration difficult. Web-based collaborative XR can enhance adoption of XR technologies, using the browser as a platform-independent interface. However, challenges arise from the browser environment, such as performance limitations. To this end, we present a WebXR-based framework for hand interaction in cross-platform collaboration in XR. A network structure and methods for collaborative and individual object manipulation complement the integrated hand tracking. Three different fidelity levels to represent the hands of remote users were implemented to accommodate different performance capabilities. Concepts ranged from virtual hands to discrete poses with abstract objects. A sample application was implemented with a puzzle task. Two users collaborated in the browsers of the Microsoft HoloLens 2 and the Meta Quest 2. Qualitative and quantitative data on user performance (n=9), and frame rate recordings (n=1) were collected. All users were able to solve the puzzle together quickly and intu-itively. The Quest environment was preferred, as there were more performance issues with the HoloLens. Hand interaction was well-received and proved to be sufficient as the only form of communication. Simpler representations of the hands lead to a higher frame rate, whereby the effects were device-dependent. The impact on task performance was low. Hand interaction enables an intuitive exchange of objects and basic communication in cross-platform collaboration via browsers. Depending on the XR environment, however, device-specific performance limitations must be taken into account by modulating the amount of data and rendering effort.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Schott, D; Kunz, M; Heinrich, F; Mandel, J; Albrecht, A; Braun-Dullaeus, R; Hansen, C
Stand Alone or Stay Together: An In-situ Experiment of Mixed-Reality Applications in Embryonic Anatomy Education Proceedings Article
In: Proceedings of the 30th ACM Symposium on Virtual Reality Software and Technology, pp. 1–11, Association for Computing Machinery, New York, NY, USA, 2024, ISBN: 979-8-4007-0535-9.
@inproceedings{schott_stand_2024,
title = {Stand Alone or Stay Together: An In-situ Experiment of Mixed-Reality Applications in Embryonic Anatomy Education},
author = {D Schott and M Kunz and F Heinrich and J Mandel and A Albrecht and R Braun-Dullaeus and C Hansen},
url = {https://dl.acm.org/doi/10.1145/3641825.3687706},
doi = {10.1145/3641825.3687706},
isbn = {979-8-4007-0535-9},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
booktitle = {Proceedings of the 30th ACM Symposium on Virtual Reality Software and Technology},
pages = {1–11},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
series = {VRST '24},
abstract = {Where traditional media and methods reach their limits in anatomy education, mixed-reality (MR) environments can provide effective learning support because of their high interactivity and spatial visualization capabilities. However, the underlying design and pedagogical requirements are as diverse as the technologies themselves. This paper examines the effectiveness of individual- and collaborative learning environments for anatomy education, using embryonic heart development as an example. Both applications deliver the same content using identical visualizations and hardware but differ in interactivity and pedagogical approach. The environments were evaluated in a user study with medical students (n = 90) during their examination phase, assessing usability, user experience, social interaction/co-presence, cognitive load, and personal preference. Additionally, we conducted a knowledge test before and after an MR learning session to determine educational effects compared to a conventional anatomy seminar. Results indicate that the individual learning environment was generally preferred. However, no significant difference in learning effectiveness could be shown between the conventional approach and the MR applications. This suggests that both can effectively complement traditional seminars despite their different natures. Our study contributes to understanding how different MR settings could be tailored for anatomical education.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
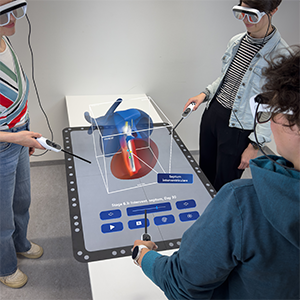
Schott, D; Heinrich, F; Kunz, M; Mandel, J; Albrecht, A; Braun-Dullaeus, R; Hansen, C
CardioCoLab: Collaborative Learning of Embryonic Heart Anatomy in Mixed Reality Journal Article
In: Eurographics Workshop on Visual Computing for Biology and Medicine, 2024, (Artwork Size: 5 pages Edition: 1191 ISBN: 9783038682448 Publisher: The Eurographics Association).
@article{schott_cardiocolab_2024,
title = {CardioCoLab: Collaborative Learning of Embryonic Heart Anatomy in Mixed Reality},
author = {D Schott and F Heinrich and M Kunz and J Mandel and A Albrecht and R Braun-Dullaeus and C Hansen},
url = {https://diglib.eg.org/handle/10.2312/vcbm20241191},
doi = {10.2312/VCBM.20241191},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {Eurographics Workshop on Visual Computing for Biology and Medicine},
abstract = {The complexity of embryonic heart development presents significant challenges for medical education, particularly in illustrating dynamic morphological changes over short time periods. Traditional teaching methods, such as 2D textbook illustrations and static models, are often insufficient for conveying these intricate processes. To address this gap, we developed a multi-user Mixed Reality (MR) system designed to enhance collaborative learning and interaction with virtual heart models. Building on previous research, we identified the needs of both students and teachers, implementing various interaction and visualization features iteratively. An evaluation with teachers and students (N = 12) demonstrated the system's effectiveness in improving engagement and understanding of embryonic heart development. The study highlights the potential of MR in medical seminar settings as a valuable addition to medical education by enhancing traditional learning methods.},
note = {Artwork Size: 5 pages
Edition: 1191
ISBN: 9783038682448
Publisher: The Eurographics Association},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
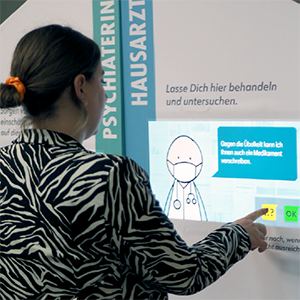
Wagnerberger, D; Schott, D; Schwenderling, L; Hansen, C; Schumacher, D
Empowering Patients: Improve Gender-Sensitive Medical Knowledge Through Interactive Edutainment Proceedings Article
In: Proceedings of the 13th Nordic Conference on Human-Computer Interaction, pp. 1–12, Association for Computing Machinery, New York, NY, USA, 2024, ISBN: 979-8-4007-0966-1.
@inproceedings{wagnerberger_empowering_2024,
title = {Empowering Patients: Improve Gender-Sensitive Medical Knowledge Through Interactive Edutainment},
author = {D Wagnerberger and D Schott and L Schwenderling and C Hansen and D Schumacher},
url = {https://dl.acm.org/doi/10.1145/3679318.3685500},
doi = {10.1145/3679318.3685500},
isbn = {979-8-4007-0966-1},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
booktitle = {Proceedings of the 13th Nordic Conference on Human-Computer Interaction},
pages = {1–12},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
series = {NordiCHI '24},
abstract = {Disregarding crucial gender-specific differences and potential risks in medicine leads to widespread gender inequalities. This paper introduces interactive edutainment concepts developed through a user-centered design approach to raise awareness of gender medicine. An interactive exhibition course and an accompanying deck of cards provide an engaging and sensitizing experience of medical gender inequalities. Qualitative feedback, self-assessment, and user experience and behavior were evaluated during a public display of the concepts (n=14). The results highlight the potential of our playful approach to raising awareness among the public as well as health-related professionals, paving new ways for communication and empowerment of patients of all genders. We believe these insights have broader applicability across various domains, supporting efforts to address all forms of inequality.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
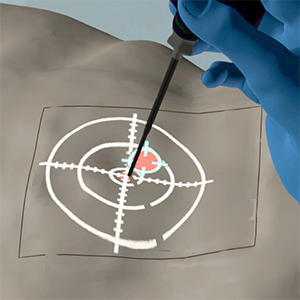
Polenz, L; Joeres, F; Hansen, C; Heinrich, F
Simulating projective Augmented Reality Visualizations in Virtual Reality: Is VR a feasible Environment for medical AR Evaluations? Proceedings Article
In: Extended Abstracts of the CHI Conference on Human Factors in Computing Systems, pp. 1–8, Association for Computing Machinery, New York, NY, USA, 2024, ISBN: 979-8-4007-0331-7.
@inproceedings{polenz_simulating_2024,
title = {Simulating projective Augmented Reality Visualizations in Virtual Reality: Is VR a feasible Environment for medical AR Evaluations?},
author = {L Polenz and F Joeres and C Hansen and F Heinrich},
url = {https://doi.org/10.1145/3613905.3650843},
doi = {10.1145/3613905.3650843},
isbn = {979-8-4007-0331-7},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
booktitle = {Extended Abstracts of the CHI Conference on Human Factors in Computing Systems},
pages = {1–8},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
series = {CHI EA '24},
abstract = {Augmented Reality (AR) has demonstrated potential in medical applications, such as enhancing surgical navigation. However, evaluating medical AR visualizations entails high costs and effort to provide suitable hardware solutions. This is particularly crucial in projective AR, as these systems require several error-prone calibration and registration steps. This work investigates the suitability of Virtual Reality (VR) as a cost-effective and controlled study environment for evaluating projective AR visualizations. A virtual twin of a real laboratory environment was created, and a user study comparing two needle navigation visualizations was conducted. The study simulated identical experiments in both AR and VR to assess if similar results would emerge. Our findings indicate that both AR and VR experiments exhibited comparable effects in terms of performance and workload of both needle insertion visualizations. This study serves as a preliminary step in demonstrating the feasibility of using VR as an evaluation environment for projective AR visualizations.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Allgaier, M; Huettl, F; Hanke, L; Huber, T; Preim, B; Saalfeld, S; Hansen, C
Gamification Concepts for a VR-based Visuospatial Training for Intraoperative Liver Ultrasound Proceedings Article
In: Extended Abstracts of the CHI Conference on Human Factors in Computing Systems, pp. 1–8, Association for Computing Machinery, New York, NY, USA, 2024, ISBN: 979-8-4007-0331-7.
@inproceedings{allgaier_gamification_2024,
title = {Gamification Concepts for a VR-based Visuospatial Training for Intraoperative Liver Ultrasound},
author = {M Allgaier and F Huettl and L Hanke and T Huber and B Preim and S Saalfeld and C Hansen},
url = {https://doi.org/10.1145/3613905.3650736},
doi = {10.1145/3613905.3650736},
isbn = {979-8-4007-0331-7},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
booktitle = {Extended Abstracts of the CHI Conference on Human Factors in Computing Systems},
pages = {1–8},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
series = {CHI EA '24},
abstract = {Gamification is widely used due to its positive influence on learning by adding emotions and steering behavior. In medical VR training applications, the use of gamification is rare, and when it is implemented, it often lacks thoughtful design decisions and empirical evaluation. Using a VR-based training for intraoperative ultrasound for liver surgery, we analyzed game elements regarding their suitability and examined two in more detail: difficulty levels and a kit, where the user has to assemble a virtual liver using US. In a broad audience study, levels achieved significantly better results regarding enjoyment. Qualitative feedback from medical students directly comparing the elements revealed that they prefer the kit as well as levels for training. Our studies indicate that levels and the more interactive kit improve the learning experience, which could also be taken as a basis for similar VR-based medical training applications.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Schröer, S; Alpers, J; Gutberlet, M; Brüsch, I; Rumpel, R; Wacker, F; Hensen, B; Hansen, C
A probabilistic thermal dose model for the estimation of necrosis in MR-guided tumor ablations Journal Article
In: Medical Physics, vol. 51, no. 1, pp. 239–250, 2024, ISSN: 2473-4209, (_eprint: https://aapm.onlinelibrary.wiley.com/doi/pdf/10.1002/mp.16605).
@article{schroer_probabilistic_2024,
title = {A probabilistic thermal dose model for the estimation of necrosis in MR-guided tumor ablations},
author = {S Schröer and J Alpers and M Gutberlet and I Brüsch and R Rumpel and F Wacker and B Hensen and C Hansen},
url = {https://onlinelibrary.wiley.com/doi/abs/10.1002/mp.16605},
doi = {10.1002/mp.16605},
issn = {2473-4209},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
journal = {Medical Physics},
volume = {51},
number = {1},
pages = {239–250},
abstract = {Background Monitoring minimally invasive thermo ablation procedures using magnetic resonance (MR) thermometry allows therapy of tumors even close to critical anatomical structures. Unfortunately, intraoperative monitoring remains challenging due to the necessary accuracy and real-time capability. One reason for this is the statistical error introduced by MR measurement, which causes the prediction of ablation zones to become inaccurate. Purpose In this work, we derive a probabilistic model for the prediction of ablation zones during thermal ablation procedures based on the thermal damage model CEM43. By integrating the statistical error caused by MR measurement into the conventional prediction, we hope to reduce the amount of falsely classified voxels. Methods The probabilistic CEM43 model is empirically evaluated using a polyacrilamide gel phantom and three in-vivo pig livers. Results The results show a higher accuracy in three out of four data sets, with a relative difference in Sørensen–Dice coefficient from textbackslash-3.04%textbackslash to 3.97% compared to the conventional model. Furthermore, the ablation zones predicted by the probabilistic model show a false positive rate with a relative decrease of 11.89%–30.04% compared to the conventional model. Conclusion The presented probabilistic thermal dose model might help to prevent false classification of voxels within ablation zones. This could potentially result in an increased success rate for MR-guided thermal ablation procedures. Future work may address additional error sources and a follow-up study in a more realistic clinical context.},
note = {_eprint: https://aapm.onlinelibrary.wiley.com/doi/pdf/10.1002/mp.16605},
keywords = {},
pubstate = {published},
tppubtype = {article}
}