
Dr. Vuthea Chheang
Publications
2025

Hanke, L; Schwoerer, P; Huettl, F; Vradelis, L; Strelow, K; Boedecker, C; Saalfeld, P; Chheang, V; Buggenhagen, H; Lang, H; Hansen, C; Huber, T
Use of an Immersive Virtual Reality Application to Educate Medical Students in Patient Handover Journal Article
In: 2025.
@article{hanke_use_2025,
title = {Use of an Immersive Virtual Reality Application to Educate Medical Students in Patient Handover},
author = {L Hanke and P Schwoerer and F Huettl and L Vradelis and K Strelow and C Boedecker and P Saalfeld and V Chheang and H Buggenhagen and H Lang and C Hansen and T Huber},
year = {2025},
date = {2025-01-01},
urldate = {2025-01-01},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2024

Hanke, L; Vradelis, L; Boedecker, C; Griesinger, J; Demare, T; Lindemann, N; Huettl, F; Chheang, V; Saalfeld, P; Wachter, N; Wollstädter, J; Spranz, M; Lang, H; Hansen, C; Huber, T
Immersive virtual reality for interdisciplinary trauma management – initial evaluation of a training tool prototype Journal Article
In: BMC Medical Education, vol. 24, no. 1, pp. 769, 2024, ISSN: 1472-6920.
@article{hanke_immersive_2024,
title = {Immersive virtual reality for interdisciplinary trauma management – initial evaluation of a training tool prototype},
author = {L Hanke and L Vradelis and C Boedecker and J Griesinger and T Demare and N Lindemann and F Huettl and V Chheang and P Saalfeld and N Wachter and J Wollstädter and M Spranz and H Lang and C Hansen and T Huber},
url = {https://doi.org/10.1186/s12909-024-05764-w},
doi = {10.1186/s12909-024-05764-w},
issn = {1472-6920},
year = {2024},
date = {2024-07-01},
urldate = {2024-07-01},
journal = {BMC Medical Education},
volume = {24},
number = {1},
pages = {769},
abstract = {Emergency care of critically ill patients in the trauma room is an integral part of interdisciplinary work in hospitals. Live threatening injuries require swift diagnosis, prioritization, and treatment; thus, different medical specialties need to work together closely for optimal patient care. Training is essential to facilitate smooth performance. This study presents a training tool for familiarization with trauma room algorithms in immersive virtual reality (VR), and a first qualitative assessment.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
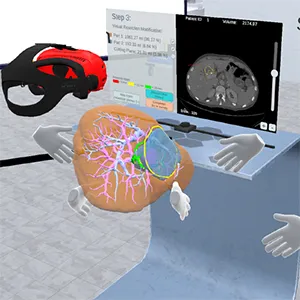
Chheang, V; Schott, D; Saalfeld, P; Vradelis, L; Huber, T; Huettl, F; Lang, H; Preim, B; Hansen, C
Advanced liver surgery training in collaborative VR environments Journal Article
In: Computers & Graphics, vol. 119, pp. 103879, 2024, ISSN: 0097-8493.
@article{chheang_advanced_2024,
title = {Advanced liver surgery training in collaborative VR environments},
author = {V Chheang and D Schott and P Saalfeld and L Vradelis and T Huber and F Huettl and H Lang and B Preim and C Hansen},
url = {https://www.sciencedirect.com/science/article/pii/S0097849324000050},
doi = {10.1016/j.cag.2024.01.006},
issn = {0097-8493},
year = {2024},
date = {2024-04-01},
urldate = {2024-04-01},
journal = {Computers & Graphics},
volume = {119},
pages = {103879},
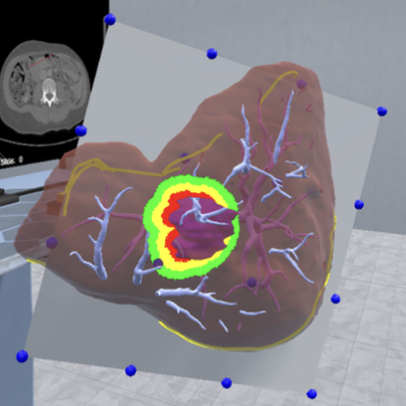
abstract = {Virtual surgical training systems are crucial for enabling mental preparation, supporting decision-making, and improving surgical skills. Many virtual surgical training environments focus only on training for a specific medical skill and take place in a single virtual room. However, surgical education and training include the planning of procedures as well as interventions in the operating room context. Moreover, collaboration among surgeons and other medical professionals is only applicable to a limited extent. This work presents a collaborative VR environment similar to a virtual teaching hospital to support surgical training and interprofessional collaboration in a co-located or remote environment. The environment supports photo-realistic avatars and scenarios ranging from planning to training procedures in the virtual operating room. It includes a lobby, a virtual surgical planning room with four surgical planning stations, laparoscopic liver surgery training with the integration of laparoscopic surgical instruments, and medical training scenarios for interprofessional team training in a virtual operating room. Each component was evaluated by domain experts as well as in a series of user studies, providing insights on usability, usefulness, and potential research directions. The proposed environment may serve as a foundation for future medical training simulators.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2023
Chheang, V; Bruggernann, R; Preim, B; Hansen, C
Virtual Resection Planning using Bezier Surface Interactions in Collaborative VR Environments Proceedings Article
In: 2023 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), pp. 166–169, 2023.
@inproceedings{chheang_virtual_2023,
title = {Virtual Resection Planning using Bezier Surface Interactions in Collaborative VR Environments},
author = {V Chheang and R Bruggernann and B Preim and C Hansen},
url = {https://ieeexplore.ieee.org/document/10108900},
doi = {10.1109/VRW58643.2023.00041},
year = {2023},
date = {2023-03-01},
urldate = {2023-03-01},
booktitle = {2023 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW)},
pages = {166–169},
abstract = {The use of virtual reality (VR) has been proposed for collaborative planning or training scenarios to aid surgeons in preparing surgical interventions. In this paper, we explore the usage of cubic Bezier surfaces and their respective interactions in collaborative VR environments to define atypical resection surfaces for planning abdominal organ tumor resections. We conducted a pilot study (n = 10) to evaluate the usability of the Bezier surface interaction compared to a free deformation approach using the example of liver surgery planning. Moreover, we showed the prototype to an expert and conducted an interview to collect clinical feedback. The results show potential benefits of both interaction techniques that could be essential for virtual resection planning and training. The expert highlighted that combining both techniques could speed up the workflow and provide various options for planning.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
2022
Allgaier, M; Chheang, V; Saalfeld, P; Apilla, V; Huber, T; Huettl, F; Neyazi, B; Sandalcioglu, E; Hansen, C; Preim, B; Saalfeld, P
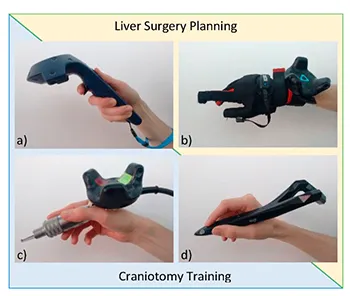
A comparison of input devices for precise interaction tasks in VR-based surgical planning and training Journal Article
In: Computers in Biology and Medicine, vol. 145, pp. 105429, 2022, ISSN: 0010-4825.
@article{allgaier_comparison_2022,
title = {A comparison of input devices for precise interaction tasks in VR-based surgical planning and training},
author = {M Allgaier and V Chheang and P Saalfeld and V Apilla and T Huber and F Huettl and B Neyazi and E Sandalcioglu and C Hansen and B Preim and P Saalfeld},
url = {https://www.sciencedirect.com/science/article/pii/S0010482522002219},
doi = {10.1016/j.compbiomed.2022.105429},
issn = {0010-4825},
year = {2022},
date = {2022-06-01},
urldate = {2022-06-01},
journal = {Computers in Biology and Medicine},
volume = {145},
pages = {105429},
abstract = {To exploit the potential of virtual reality (VR) in medicine, the input devices must be selected carefully due to their different benefits. In this work, input devices for common interaction tasks in medical VR planning and training are compared. Depending on the specific purpose, different requirements exist. Therefore, an appropriate trade-off between meeting task-specific requirements and having a widely applicable device has to be found. We focus on two medical use cases, liver surgery planning and craniotomy training, to cover a broad medical domain. Based on these, relevant input devices are compared with respect to their suitability for performing precise VR interaction tasks. The devices are standard VR controllers, a pen-like VR Ink, data gloves and a real craniotome, the medical instrument used for craniotomy. The input devices were quantitatively compared with respect to their performance based on different measurements. The controllers and VR Ink performed significantly better than the remaining two devices regarding precision. Qualitative data concerning task load, cybersickness, and usability and appropriateness of the devices were assessed. Although no device stands out for both applications, most participants preferred using the VR Ink, followed by the controller and finally the data gloves and craniotome. These results can guide the selection of an appropriate device for future medical VR applications.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Chheang, V; Heinrich, F; Joeres, F; Saalfeld, P; Preim, B; Hansen, C
Group WiM: A Group Navigation Technique for Collaborative Virtual Reality Environments Proceedings Article
In: 2022 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), pp. 556–557, 2022.
@inproceedings{chheang_group_2022,
title = {Group WiM: A Group Navigation Technique for Collaborative Virtual Reality Environments},
author = {V Chheang and F Heinrich and F Joeres and P Saalfeld and B Preim and C Hansen},
url = {https://ieeexplore.ieee.org/document/9757426},
doi = {10.1109/VRW55335.2022.00129},
year = {2022},
date = {2022-03-01},
urldate = {2022-03-01},
booktitle = {2022 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW)},
pages = {556–557},
abstract = {In this work, we present a group World-in-Miniature (WiM) navigation technique that allows a guide to navigate a team in collaborative virtual reality (VR) environments. We evaluated the usability, discomfort, and user performance of the proposed technique compared to state-of-the-art group teleportation in a user study łeft(ntextbackslash,=textbackslash,21textbackslashright). The results show that the proposed technique induces less discomfort for the guide and has slight usability advantages. Additionally, the group WiM technique seems superior in regards to task completion time for obstructed target destination. However, it performs similarly to the group teleportation technique in direct line of sight cases. The group WiM technique provides potential benefits for effective group navigation in complex virtual environments and harder-to-reach target locations.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}

Chheang, V; Schott, D; Saalfeld, P; Vradelis, L; Huber, T; Huettl, F; Lang, H; Preim, B; Hansen, C
Towards Virtual Teaching Hospitals for Advanced Surgical Training Proceedings Article
In: 2022 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), pp. 410–414, 2022.
@inproceedings{chheang_towards_2022,
title = {Towards Virtual Teaching Hospitals for Advanced Surgical Training},
author = {V Chheang and D Schott and P Saalfeld and L Vradelis and T Huber and F Huettl and H Lang and B Preim and C Hansen},
url = {https://ieeexplore.ieee.org/document/9757460},
doi = {10.1109/VRW55335.2022.00089},
year = {2022},
date = {2022-03-01},
urldate = {2022-03-01},
booktitle = {2022 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW)},
pages = {410–414},
abstract = {Existing virtual training environments in medicine usually focus only on the training of a specific medical skill and are conducted in a single virtual room. However, medical challenges are often in the context of the planning procedure and operating room intervention. Therefore, it is crucial to provide a training environment that tackles these issues. In this paper, we present a prototype of surgical department within a virtual teaching hospital. It supports multiple users, photo-realistic avatars, and training scenarios ranging from planning procedures to laparoscopic surgery in the virtual operating room. Medical data for each virtual patient is synchronized across the different rooms, allowing users to view, analyze and train on key decision points from diagnosis to surgical incision for each patient. The environment was evaluated in a pilot study with five surgical residents and one medical student. The experts assessed the environment as an essential tool to evaluate and improve surgical planning as well as the training during critical situations of the surgical procedures. We conclude that the development of the virtual teaching hospital components described here has the potential to be a basis for future generations of medical training simulators.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Chheang, V
Collaborative virtual reality for laparoscopic liver surgery training and planning Miscellaneous
2022, (Artwork Size: 168 Seiten Pages: 168 Seiten).
@misc{chheang_collaborative_2022,
title = {Collaborative virtual reality for laparoscopic liver surgery training and planning},
author = {V Chheang},
url = {https://opendata.uni-halle.de//handle/1981185920/94034},
doi = {10.25673/92082},
year = {2022},
date = {2022-01-01},
urldate = {2022-01-01},
publisher = {Universitäts- und Landesbibliothek Sachsen-Anhalt},
abstract = {Surgical training and planning software in laparoscopic liver surgery is essential in providing mental preparation, supporting decision making, and improving psychomotor skills. Desktop-based systems are easily-accessible. However, they provide limited interaction and visualization possibilities compared to virtual reality (VR) setups. Moreover, collaborative training and planning among surgeons are only viable to a limited extent. Within this dissertation, the aim is to investigate novel immersive VR to support physicians in laparoscopic liver surgery training, planning, and interprofessional collaboration in a co-located or remote environment. First, a collaborative VR environment for laparoscopic liver surgery training is investigated and developed. Laparoscopic surgical joysticks are used and integrated into a virtual operating room, and laparoscopic procedures, such as real-time cutting simulation on real patient data, are developed and evaluated. Second, an environment for interprofessional team training in the laparoscopic setting is proposed. The aim is to improve and train intraoperative communication between surgical teams and anesthesiologists during laparoscopic procedures. Therefore, two medical training scenarios are proposed and assessed by experts. Third, a collaborative VR environment aimed at liver surgery planning is investigated. This objective is to improve virtual resection planning with an enhanced virtual resection technique and a real-time risk map visualization. The last objective of this dissertation is to develop an advanced surgical training environment, which is an integration of proposed prototypes of laparoscopic training, interprofessional team training, and liver surgery planning, into one environment. Moreover, a group navigation technique is proposed to optimize the navigation processes in the collaborative VR environment. Each proposed environment was evaluated by domain experts in a user study. The results reveal valuable insights on potential benefits, clinical applicability, and feedback for further improvement. This dissertation presents a new approach for collaboration in surgical planning and training. It builds a basis for extensive clinical evaluation, transfers to other surgical disciplines, and opens new directions for future surgical training.},
note = {Artwork Size: 168 Seiten
Pages: 168 Seiten},
keywords = {},
pubstate = {published},
tppubtype = {misc}
}
2021
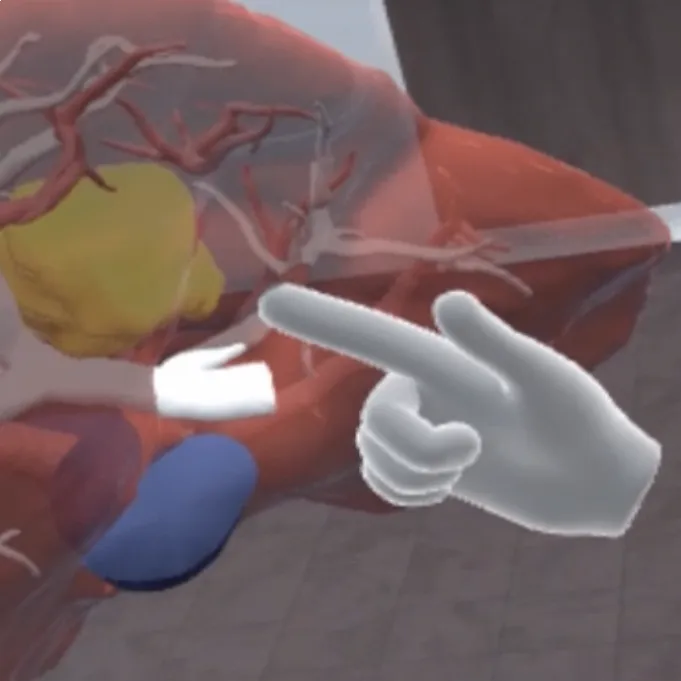
Chheang, V; Saalfeld, P; Joeres, F; Boedecker, C; Huber, T; Huettl, F; Lang, H; Preim, B; Hansen, C
A collaborative virtual reality environment for liver surgery planning Journal Article
In: Computers & Graphics, vol. 99, pp. 234–246, 2021, ISSN: 0097-8493.
@article{chheang_collaborative_2021,
title = {A collaborative virtual reality environment for liver surgery planning},
author = {V Chheang and P Saalfeld and F Joeres and C Boedecker and T Huber and F Huettl and H Lang and B Preim and C Hansen},
url = {https://www.sciencedirect.com/science/article/pii/S0097849321001400},
doi = {10.1016/j.cag.2021.07.009},
issn = {0097-8493},
year = {2021},
date = {2021-10-01},
urldate = {2021-10-01},
journal = {Computers & Graphics},
volume = {99},
pages = {234–246},
abstract = {Surgical planning software is a key component in the treatment of tumor diseases. However, desktop-based systems provide only limited visualization and interaction opportunities. Moreover, collaborative planning among members of a surgical team is only possible to a limited extent. In this work, a collaborative virtual reality (VR) environment to assist liver surgeons in tumor surgery planning is presented. Our aim is to improve virtual resection planning between surgeons in a remote or co-located environment. The system allows surgeons to define and adjust virtual resections on patient-specific organ 3D surfaces and 2D image slices. Changes on both modalities are synchronized, which will enable surgeons to iterate and refine the resection surfaces quickly. In addition, a real-time risk map visualization is presented that displays safety margins around tumors. An evaluation performed by liver surgeons provides information on potential benefits, such as the possibility to visualize complex cases and assessing the safety-critical areas, applicability, and limitations for further improvement.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
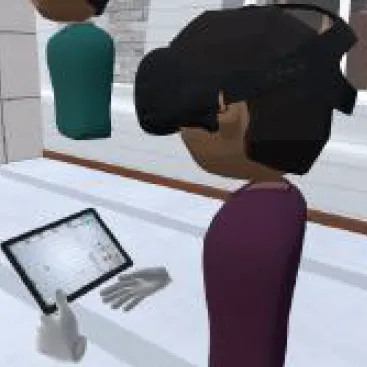
Chheang, V; Apilla, V; Saalfeld, P; Boedecker, C; Huber, T; Huettl, F; Lang, H; Preim, B; Hansen, C
Collaborative VR for Liver Surgery Planning using Wearable Data Gloves: An Interactive Demonstration Proceedings Article
In: 2021 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), pp. 768–768, 2021.
@inproceedings{chheang_collaborative_2021-1,
title = {Collaborative VR for Liver Surgery Planning using Wearable Data Gloves: An Interactive Demonstration},
author = {V Chheang and V Apilla and P Saalfeld and C Boedecker and T Huber and F Huettl and H Lang and B Preim and C Hansen},
url = {https://ieeexplore.ieee.org/abstract/document/9419102},
doi = {10.1109/VRW52623.2021.00268},
year = {2021},
date = {2021-03-01},
urldate = {2021-03-01},
booktitle = {2021 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW)},
pages = {768–768},
abstract = {Preoperative planning for liver surgery is a critical procedure to assess a potential resection and it supports surgeons to define the affected vessels and resection volume. Traditional surgical planning systems are widely used to support the planning with the usage of desktop-based 3D and 2D visualizations. However, desktop-based systems offer limited interactions and visualizations compared to virtual reality (VR) [3]. A suitable technique to support collaboration among surgeons is required. Our previous works [1], [2] illustrate that using collaborative VR is essential to enhance communication, teamwork, and over-distance collaboration. In this work, we present a collaborative VR prototype to support liver surgery planning with intuitive interactions using wearable data gloves and VR controllers. The users can explore the patient data in both 2D and 3D representations. Thereafter, a virtual resection is specified by drawing lines on the 3D model representation. The virtual re-section is further refined to keep safety margins from the tumors. Moreover, real-time risk maps are visualized to support the surgeons during the modification. Finally, the results of the virtual resection are visualized as resection volumes with their indicated amount and colors. Future work aims to conduct an extensive clinical study to compare the suitability of these input devices.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
2020

Chheang, V; Fischer, V; Buggenhagen, H; Huber, T; Huettl, F; Kneist, W; Preim, B; Saalfeld, P; Hansen, C
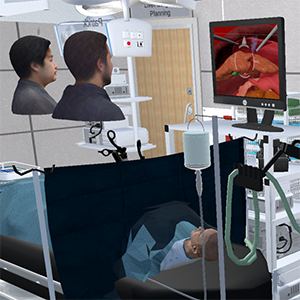
Toward interprofessional team training for surgeons and anesthesiologists using virtual reality Journal Article
In: International Journal of Computer Assisted Radiology and Surgery, vol. 15, no. 12, pp. 2109–2118, 2020, ISSN: 1861-6429.
@article{chheang_toward_2020,
title = {Toward interprofessional team training for surgeons and anesthesiologists using virtual reality},
author = {V Chheang and V Fischer and H Buggenhagen and T Huber and F Huettl and W Kneist and B Preim and P Saalfeld and C Hansen},
url = {https://doi.org/10.1007/s11548-020-02276-y},
doi = {10.1007/s11548-020-02276-y},
issn = {1861-6429},
year = {2020},
date = {2020-12-01},
urldate = {2020-12-01},
journal = {International Journal of Computer Assisted Radiology and Surgery},
volume = {15},
number = {12},
pages = {2109–2118},
abstract = {In this work, a virtual environment for interprofessional team training in laparoscopic surgery is proposed. Our objective is to provide a tool to train and improve intraoperative communication between anesthesiologists and surgeons during laparoscopic procedures.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2019
Chheang, V; Saalfeld, P; Huber, T; Huettl, F; Kneist, W; Preim, B; Hansen, C
An Interactive Demonstration of Collaborative VR for Laparoscopic Liver Surgery Training Proceedings Article
In: 2019 IEEE International Conference on Artificial Intelligence and Virtual Reality (AIVR), pp. 247–2471, IEEE, San Diego, CA, USA, 2019, ISBN: 978-1-7281-5604-0.
@inproceedings{chheang_interactive_2019,
title = {An Interactive Demonstration of Collaborative VR for Laparoscopic Liver Surgery Training},
author = {V Chheang and P Saalfeld and T Huber and F Huettl and W Kneist and B Preim and C Hansen},
url = {https://ieeexplore.ieee.org/document/8942344/},
doi = {10.1109/AIVR46125.2019.00055},
isbn = {978-1-7281-5604-0},
year = {2019},
date = {2019-12-01},
urldate = {2025-08-14},
booktitle = {2019 IEEE International Conference on Artificial Intelligence and Virtual Reality (AIVR)},
pages = {247–2471},
publisher = {IEEE},
address = {San Diego, CA, USA},
abstract = {We introduce a collaborative virtual reality (VR) system for planning and simulation in laparoscopic liver surgery training. Patient image data is used for surgical model visualization and simulation. We developed two modes for training in laparoscopic procedures: exploration and surgery mode. Surgical joysticks are used in surgery mode to provide training for psychomotor skills and cooperation between a camera assistant and an experienced surgeon. Continuous feedback from our clinical partner comprised an important part of the development. Our evaluation showed that surgeons were positive about the usability and usefulness of the developed system. For further details, please refer to our full article [1] and additional materials.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Chheang, V; Saalfeld, P; Huber, T; Huettl, F; Kneist, W; Preim, B; Hansen, C
Collaborative Virtual Reality for Laparoscopic Liver Surgery Training Proceedings Article
In: 2019 IEEE International Conference on Artificial Intelligence and Virtual Reality (AIVR), pp. 1–17, IEEE, San Diego, CA, USA, 2019, ISBN: 978-1-7281-5604-0.
@inproceedings{chheang_collaborative_2019,
title = {Collaborative Virtual Reality for Laparoscopic Liver Surgery Training},
author = {V Chheang and P Saalfeld and T Huber and F Huettl and W Kneist and B Preim and C Hansen},
url = {https://ieeexplore.ieee.org/document/8942324/},
doi = {10.1109/AIVR46125.2019.00011},
isbn = {978-1-7281-5604-0},
year = {2019},
date = {2019-12-01},
urldate = {2025-08-14},
booktitle = {2019 IEEE International Conference on Artificial Intelligence and Virtual Reality (AIVR)},
pages = {1–17},
publisher = {IEEE},
address = {San Diego, CA, USA},
abstract = {Virtual reality (VR) has been used in many medical training systems for surgical procedures. However, the current systems are limited due to inadequate interactions, restricted possibilities of patient data visualization, and collaboration. We propose a collaborative VR system for laparoscopic liver surgical planning and simulation. Medical image data is used for model visualization and manipulation. Additionally, laparoscopic surgical joysticks are used to provide an opportunity for a camera assistant to cooperate with an experienced surgeon in VR. Continuous clinical feedback led us to optimize the visualization, synchronization, and interactions of the system. Laparoscopic surgeons were positive about the systems’ usefulness, usability, and system performance. Additionally, limitations and potential for further development are discussed.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}